Method and device for controlling regression of feeding shaft of processing center to reference point
A technology of returning to the reference point and control method, which is applied in the direction of automatic control devices, metal processing, feeding devices, etc., can solve problems such as accidents and collisions outside the normal working range, and achieve the effect of avoiding collision accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] A specific embodiment of the present invention will be described in detail below in conjunction with the accompanying drawings, but it should be understood that the protection scope of the present invention is not limited by the specific embodiment.
[0016] method embodiment
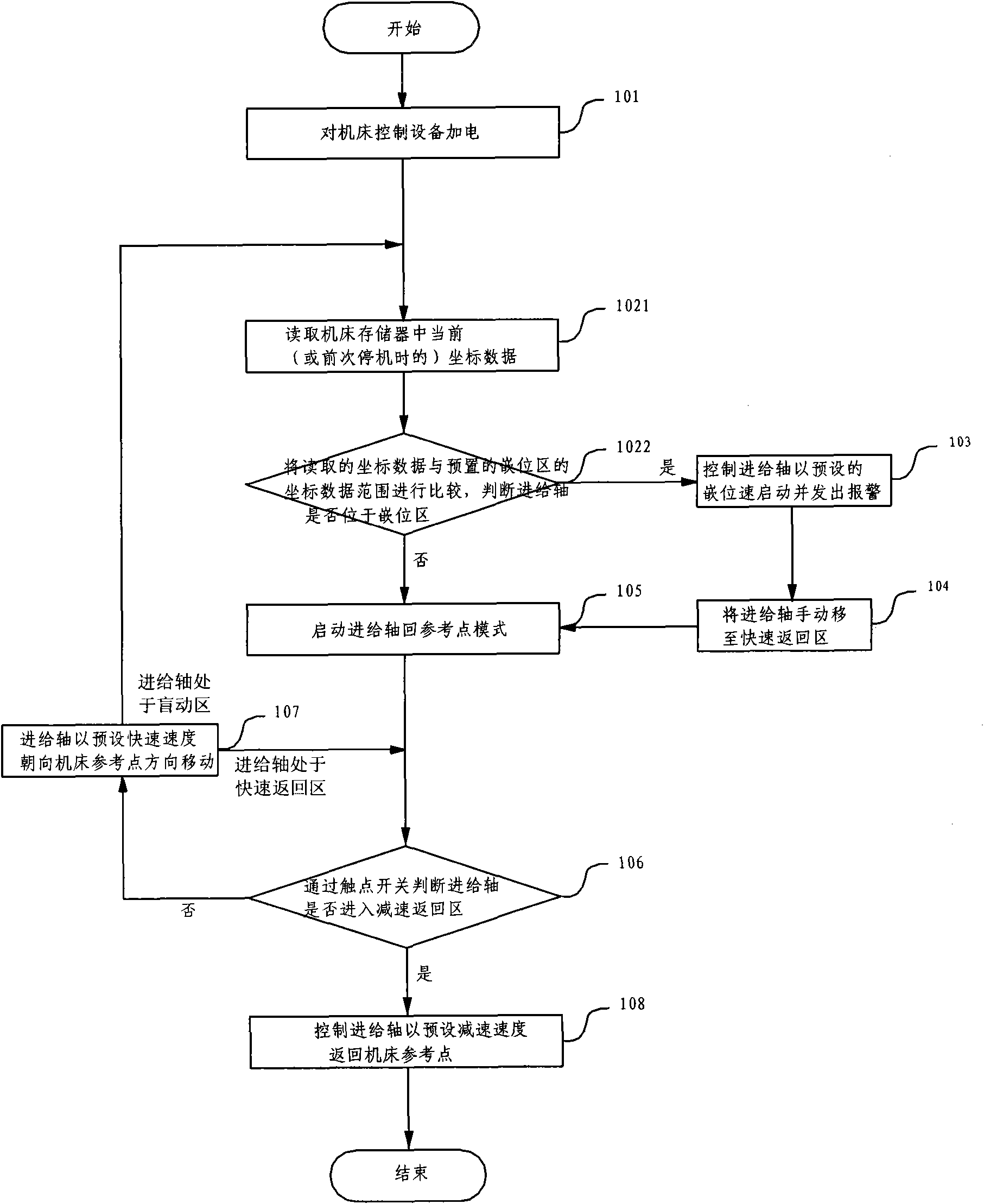
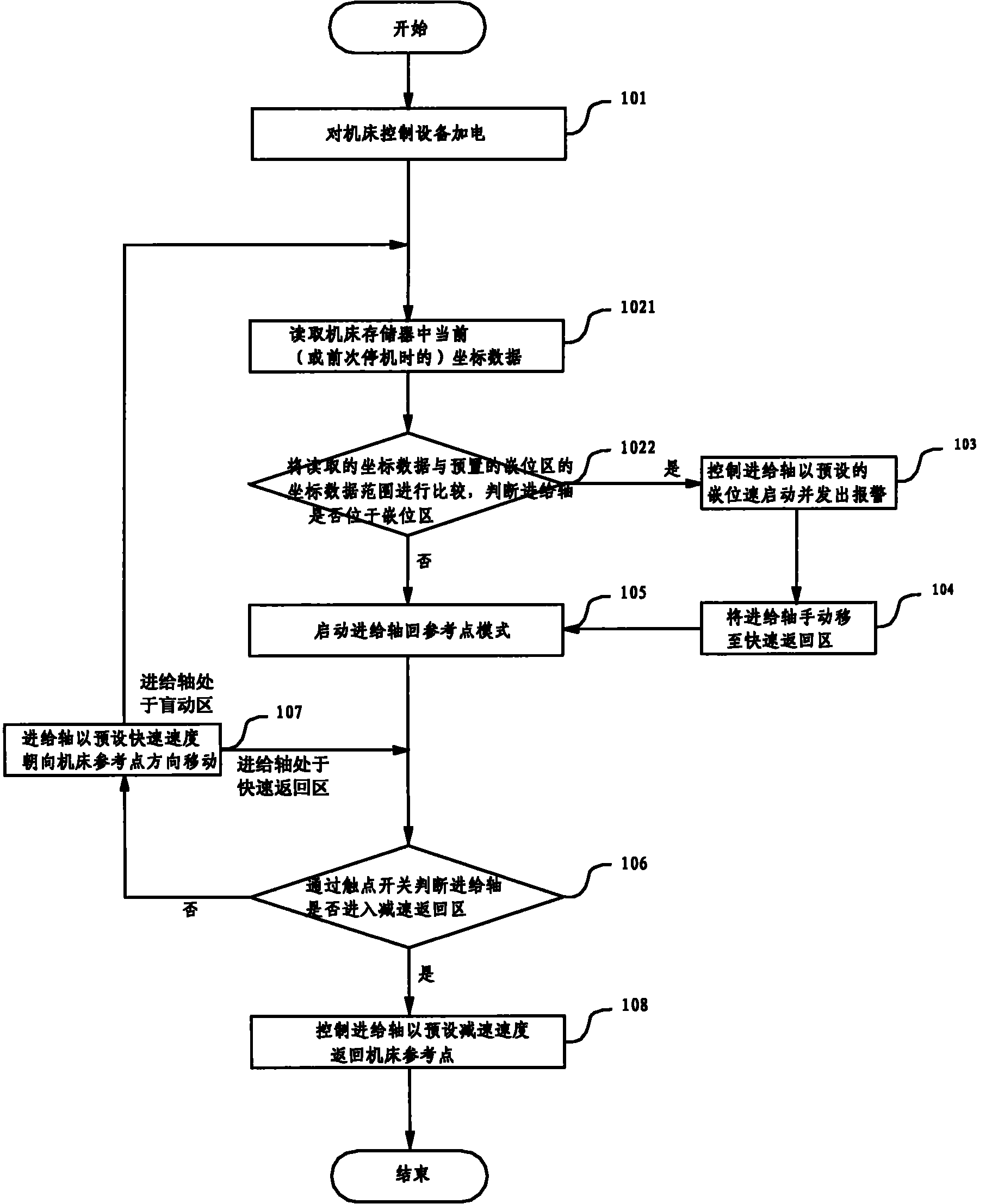
[0017] The feed axis return reference point control method of the machining center of the present invention is used to control the feed axis of the machine tool to return to the reference point of the machine tool before starting up. This control method comprises the steps:
[0018] Step 101, power on the machine tool control equipment;
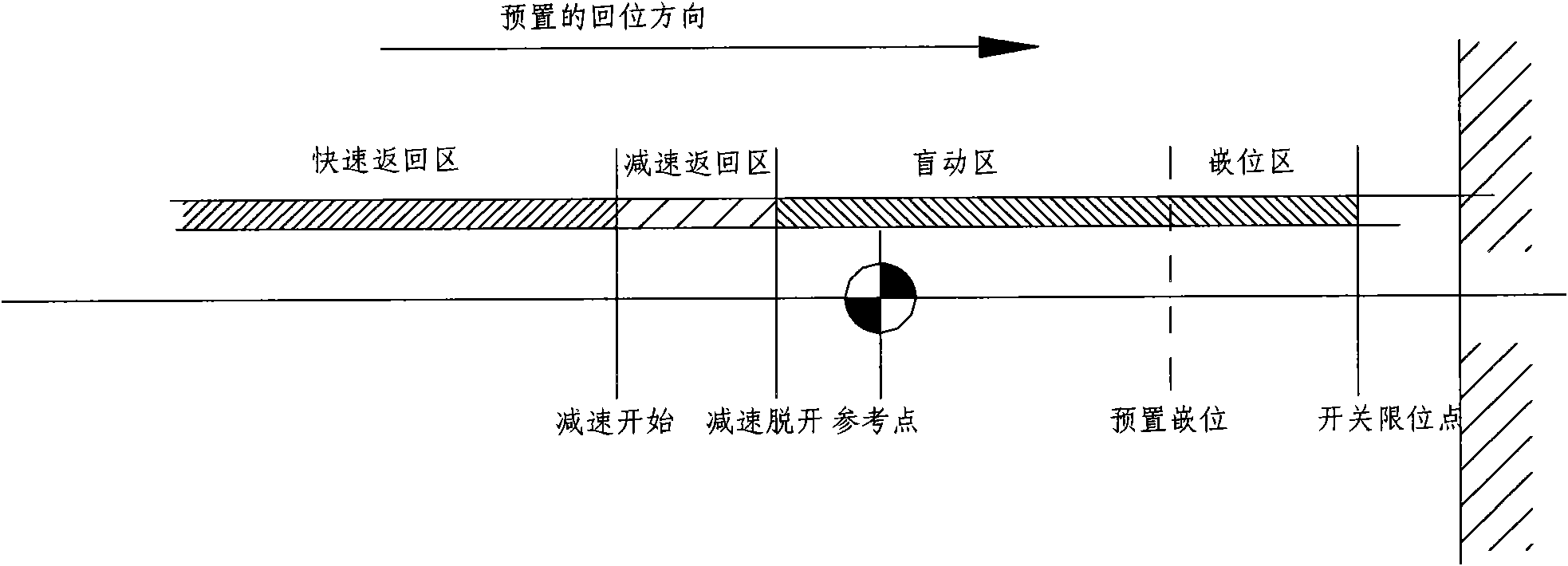
[0019] Step 102, the machine tool controller judges whether the feed axis of the machine tool is in the clamping area (such as figure 1 As shown, the area between the end of the deceleration return area and the limit point of the feed axis switch is the blind motion zone, and the area within 20mm of the feed axis switch limit point in the blind motion zone i...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap