

Decoupled three-rotation parallel mechanism
A three-rotation, parallel technology, applied in the direction of manipulators, program-controlled manipulators, metal processing machinery parts, etc., can solve the problems of low motion precision, complex structure, inconvenient control, etc., and achieve the effect of small moment of inertia, simple control and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
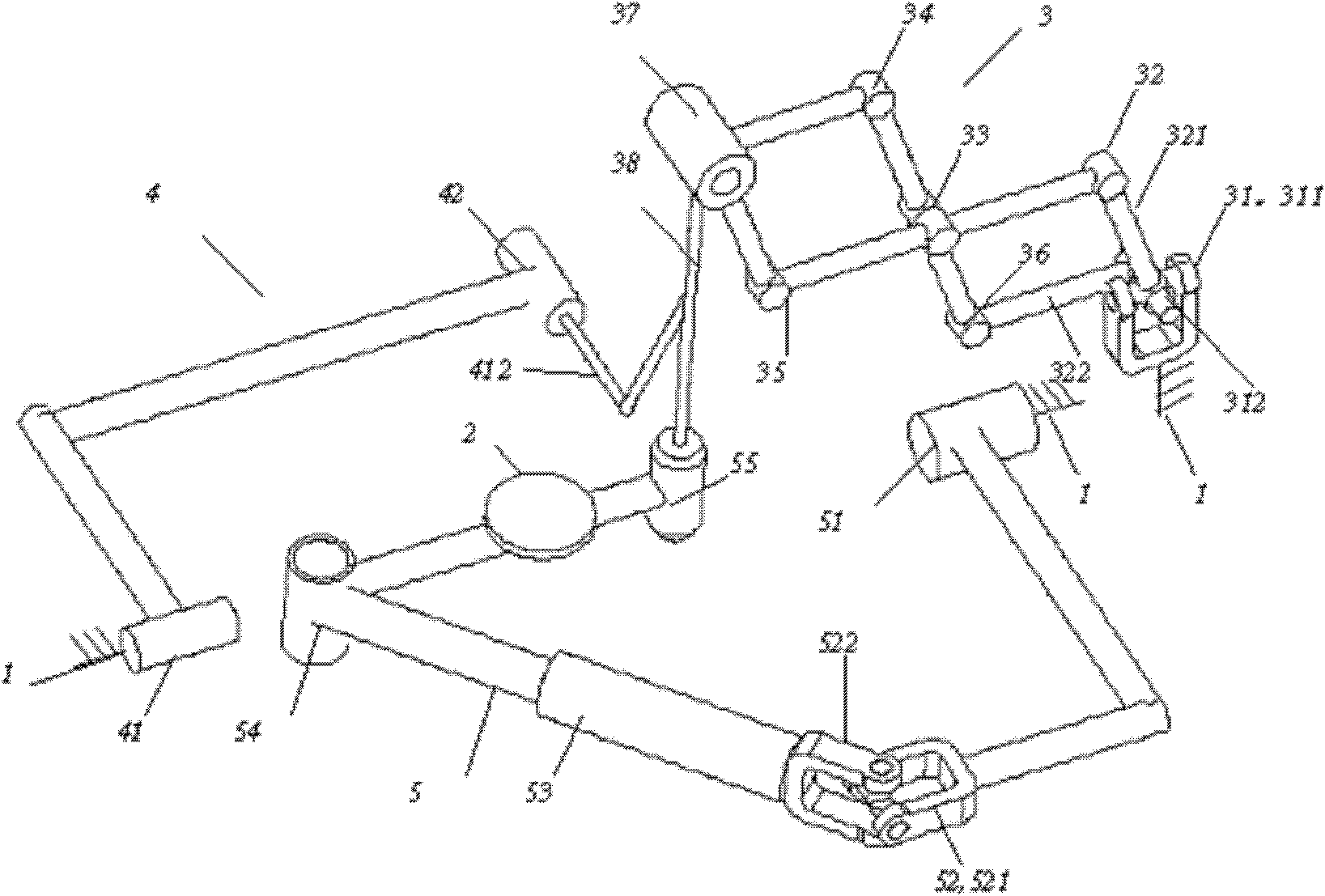
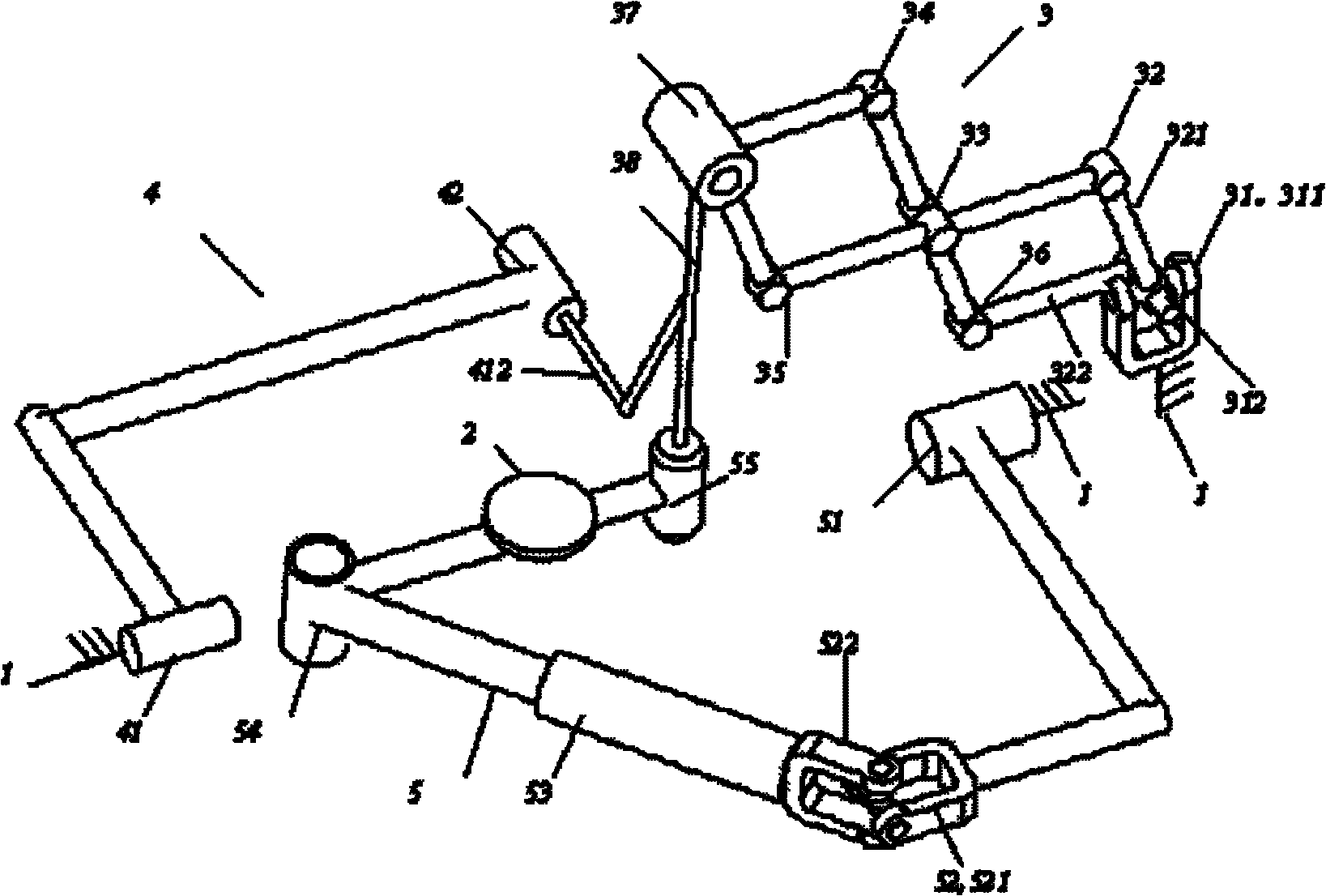
[0019] Such as figure 1 Shown: a decoupled three-rotation parallel mechanism, including a base 1, a moving platform 2, and a first kinematic branch chain 3, a second kinematic branch chain 4 and a third kinematic branch chain connected between the base 1 and the moving platform 2 Motion branch chain 5;
[0020] The first motion branch chain 3 includes a first universal hinge 31, a first swivel pair 32, a second swivel pair 33, a third swivel pair 34, a fourth swivel pair 35, a fifth swivel pair 36, The sixth rotation pair 37 and the seventh rotation pair 55, the first rotation pair 32 is connected with the first universal joint hinge 31 through the inner rod 321, and the fifth rotation pair 36 is connected with the first universal joint hinge 31 through the rod 322. The universal joint hinge 31 is connected, and the first universal joint hinge 31 is connected with the base 1, and the first rotating shaft 312 of the first universal joint hinge 31 is connected with the first ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More