

Parallel dislocation type parallel mechanism capable of three-dimensional translational motion and one-dimensional rotation
A staggered and parallel technology, applied in the field of robotics, can solve the problems of large size of the moving platform, poor force transmission effect, unfavorable mechanism efficiency, etc., achieving good rigidity and stability, satisfying complex pick-and-place operations, and long service life. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
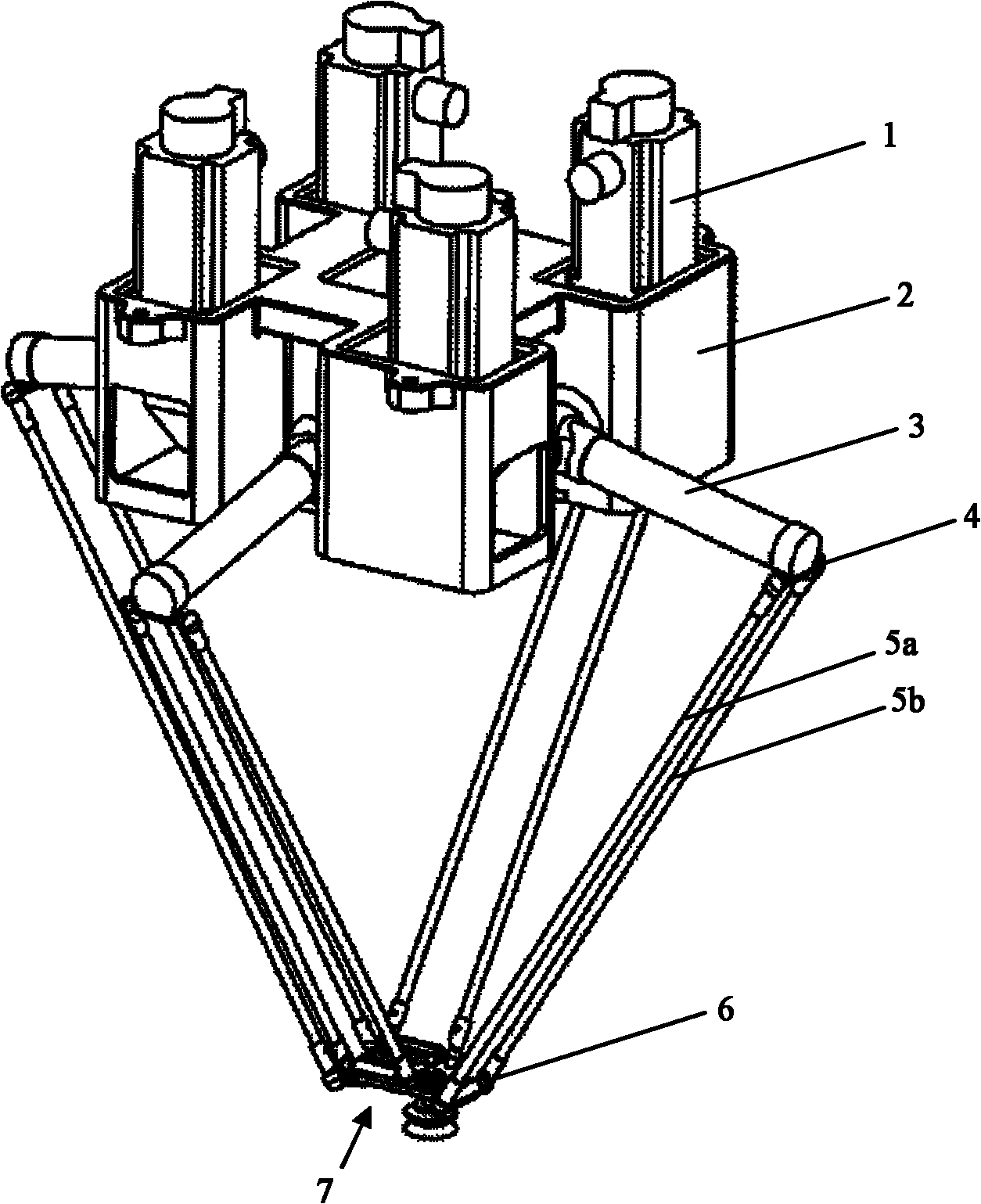
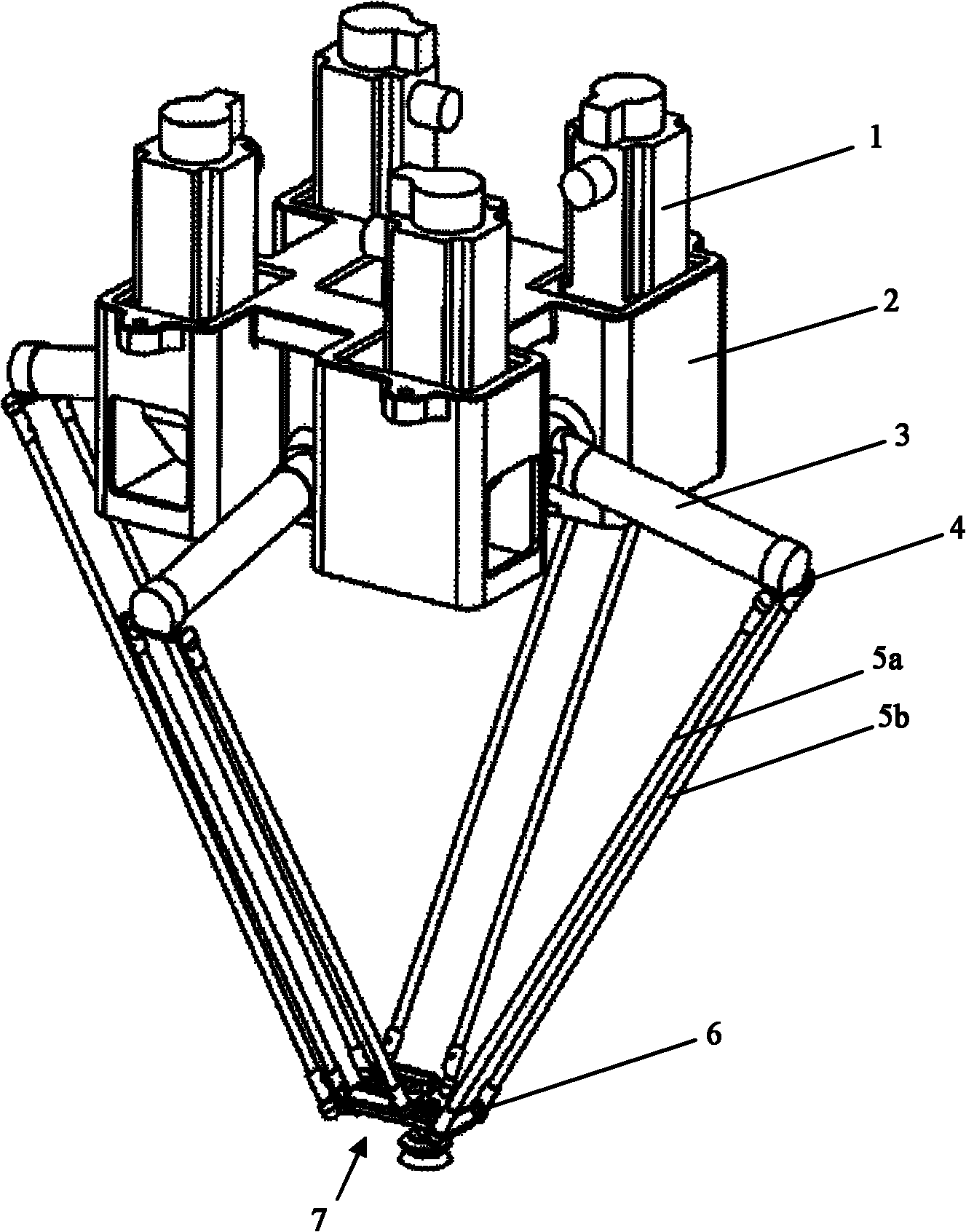
[0011] see figure 1 , a parallel staggered three-level one-rotation parallel mechanism of the present invention, comprising a fixed frame 2, a moving platform 7, and four branch chains with the same structure symmetrically arranged between the fixed frame 2 and the moving platform 7; each branch chain It is composed of a near frame rod 3 , an upper connecting shaft 4 , two mutually parallel and equal-length far frame rods 5 a, 5 b and a lower connecting shaft 6 . One end of the near frame rod 3 is affixed to the output end of the drive device 1 fixed on the fixed frame 2, and the other end of the near frame rod 3 is affixed to the upper connecting shaft 4; one end of the far frame rod 5a, 5b The ball hinges are respectively connected to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More