

Multi-robot cooperative exploring and mapping method with communication distances limited under unknown environments
An unknown environment, multi-robot technology, applied in two-dimensional position/channel control and other directions, can solve the problems that multi-robots cannot communicate at any time and anywhere, robots are difficult to reach the target point at the same time, information fusion and sharing restrictions, etc. Class nature, control input continuation, avoid the effect of extra time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
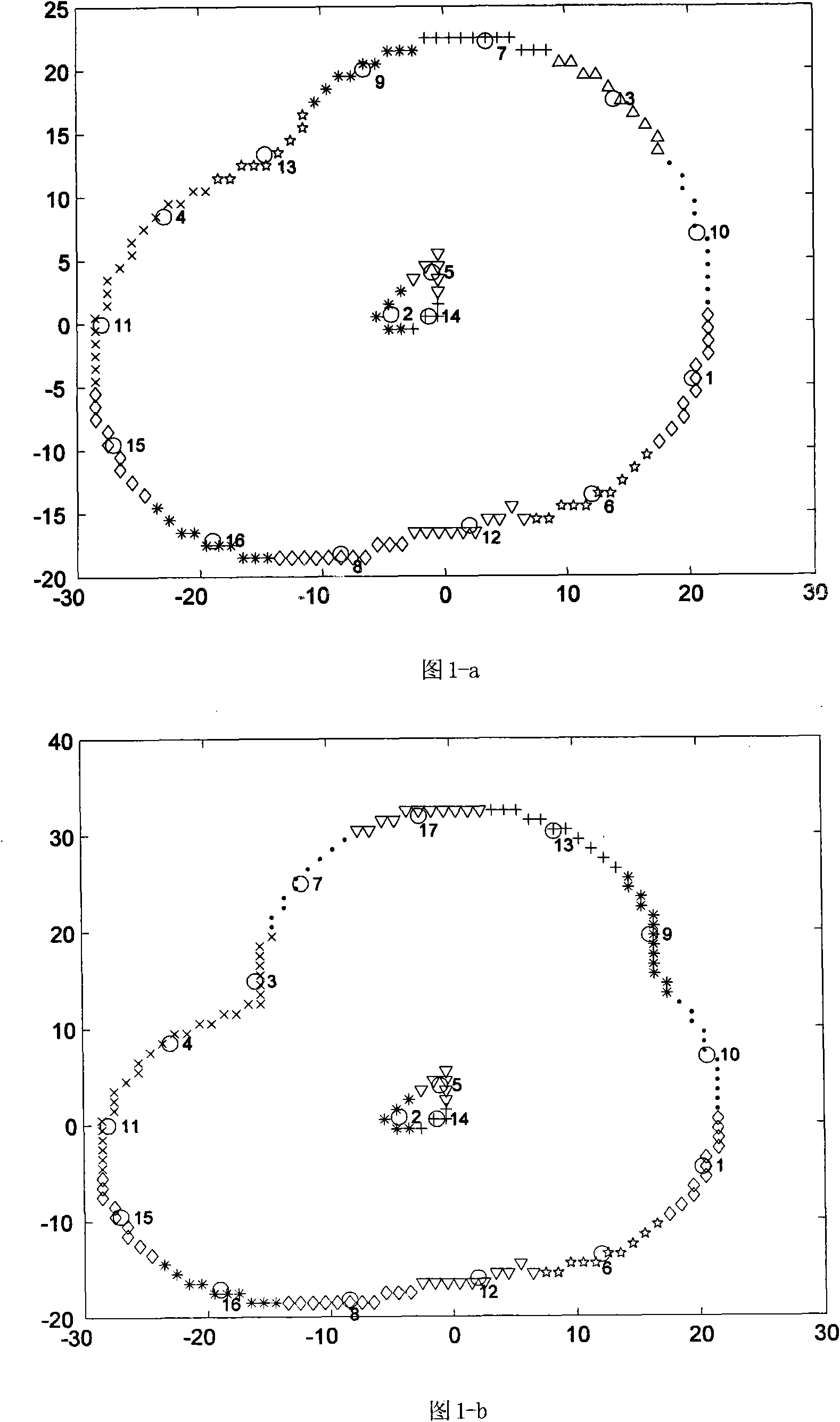
[0031] In this embodiment, the exploration task is divided into multiple stages, and the movement of the robot between two consecutive planned local target points is one stage, T i represents the ith exploration stage. to Robot R i In terms of the jth stage, it means the movement from the j-1th target point to the jth target point, and the first stage refers to the movement from the starting position to the first target point. At the initial moment of each stage, local target points need to be planned for trajectory planning.
[0032] local target point planning
[0033] Local target points need to be planned at the initial moment of each exploration stage, which is divided into two parts: candidate target point generation and local target point generation.
[0034] Candidate target point generation
[0035] The candidate target point is the center point after the clustering of boundary points. Some data structures need to be defined to distinguish the old boundary from t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More