

Underwater vehicle path planning method based on ocean current historical statistic information
A technology of historical statistics and path planning, applied in the direction of navigation calculation tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
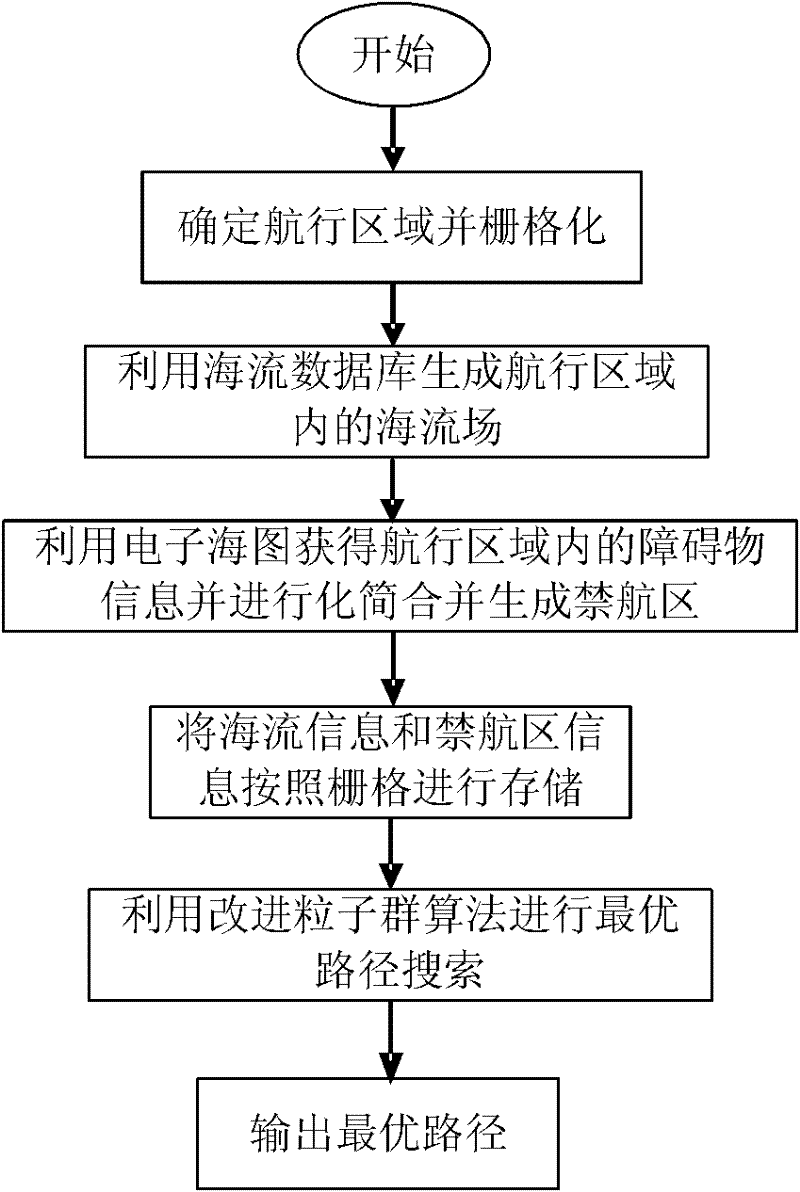
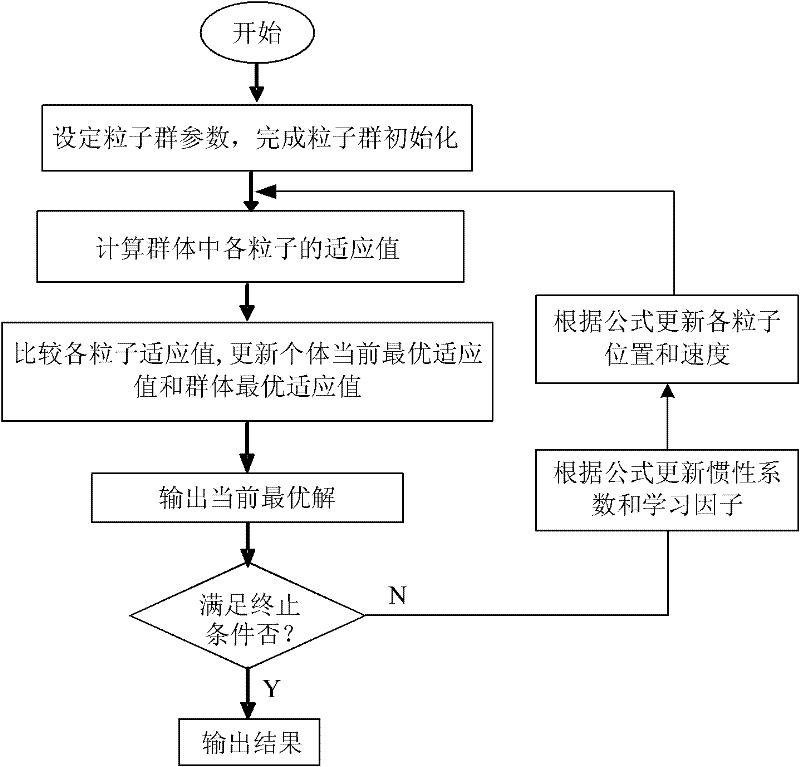
[0018] The present invention is a path planning method for underwater submersibles based on historical statistical information of ocean currents, which includes key contents such as environment modeling, ocean current field generation, path evaluation function design, and improved particle swarm algorithm design. The specific process is as follows: figure 1 shown, including the following:
[0019] Step 1. Determine the navigation area and rasterize the navigation area.
[0020] The navigation area is a rectangular area whose diagonal is the line connecting the starting point and the ending point of the route. Along the longitude and latitude directions, the division is performed at equal intervals in units of 10' to generate a grid area with a size of 10'X10'.
[0021] Step 2. Use the ocean current history statistics database to generate the ocean c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More