

Apparatus and method for detecting contact position of robot
A contact position and robot technology, applied in the field of contact position devices, can solve the problems of low operation efficiency and large delay in contact position detection, and achieve the effect of efficient detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
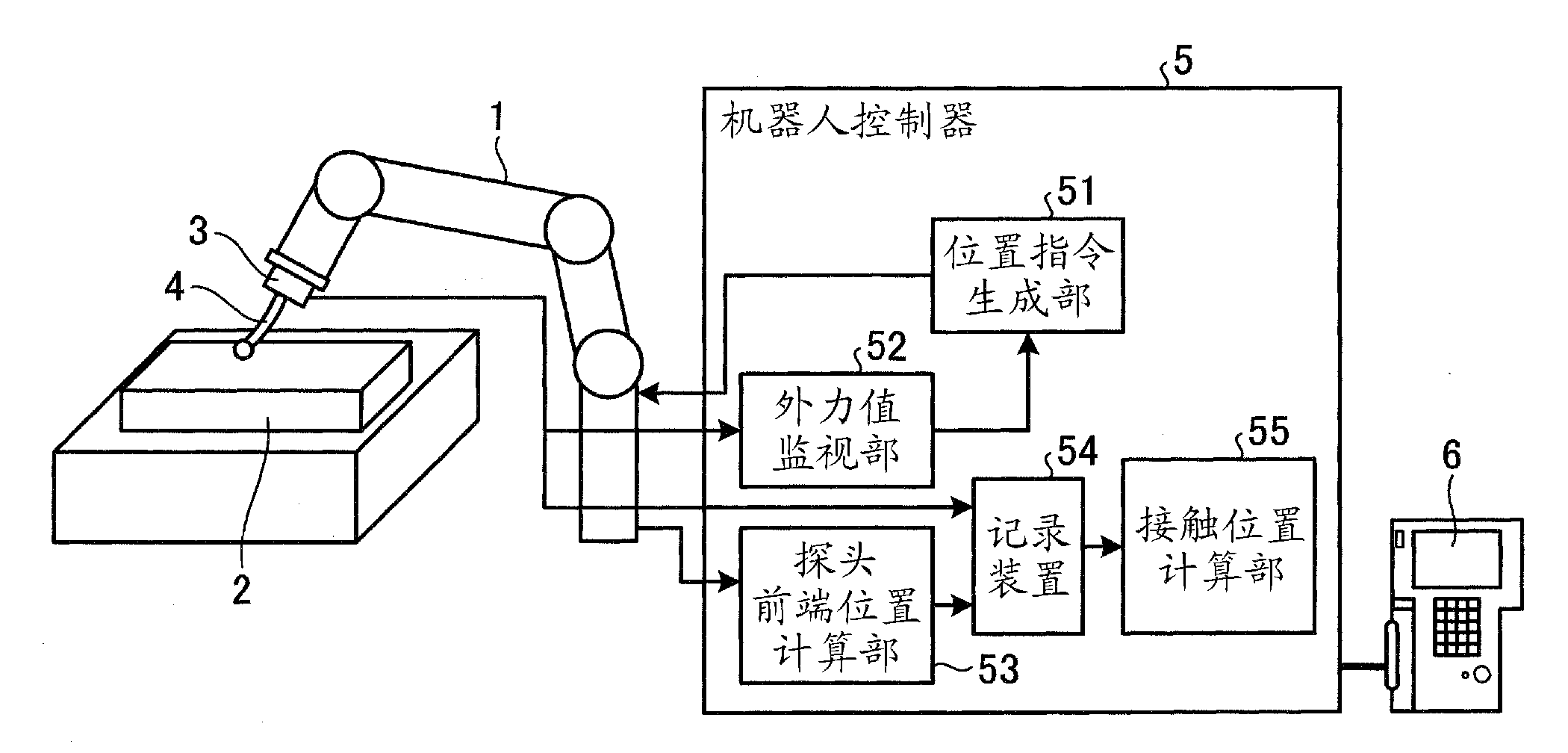
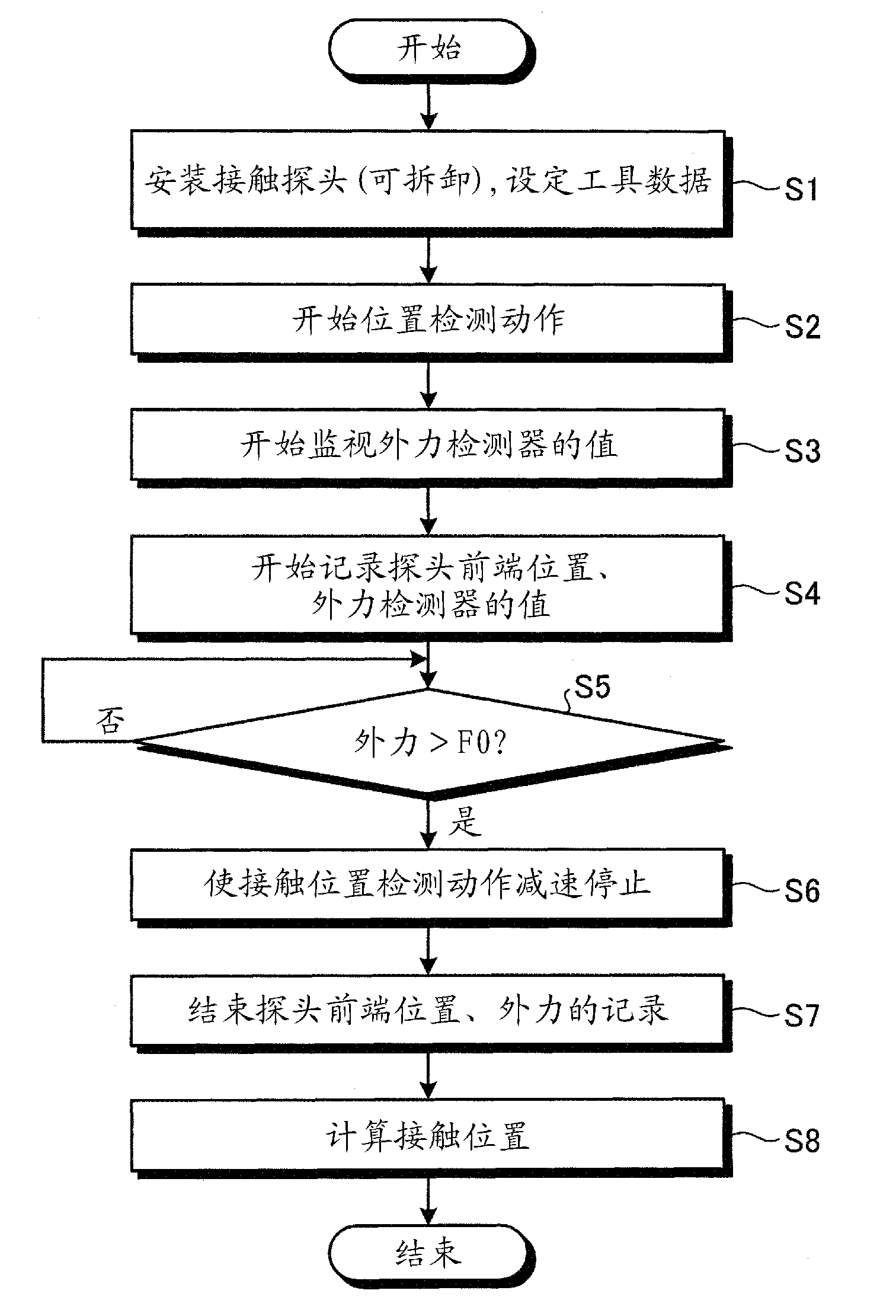
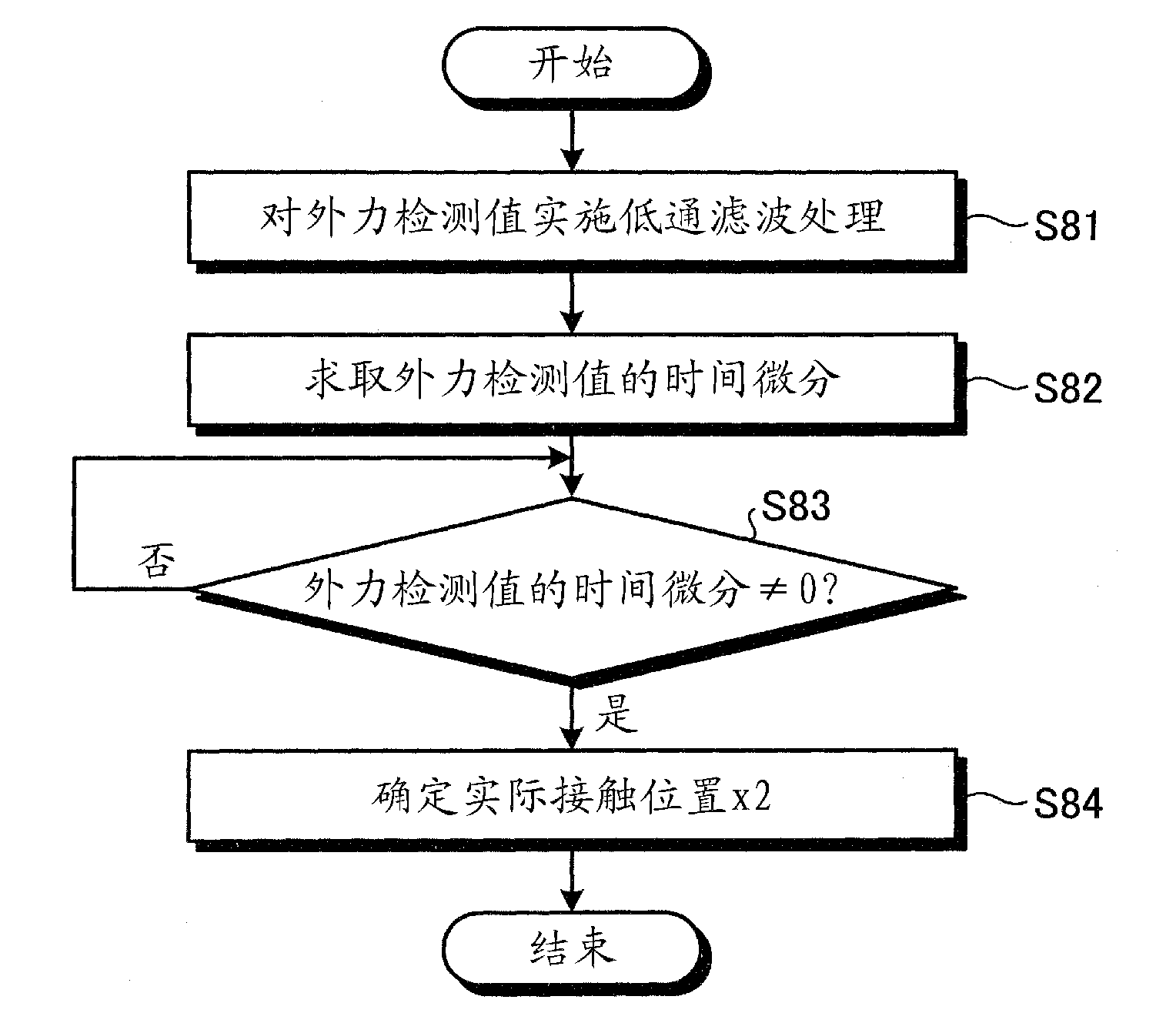
[0025] A device according to an embodiment is a device for detecting a contact position where a robot contacts an object, and includes a probe, a probe position calculation unit, a contact detection unit, and a contact position calculation unit. A probe is mounted on the robot capable of elastic displacement in the direction of contact with the object. The probe position calculation unit calculates the position of the probe with respect to the robot in operation. The contact detection unit detects a state in which the probe is in contact with an object. When the contact state of the probe is detected, the contact position calculation unit derives the contact position from the calculated position of the probe. Preferably, the device further includes a deceleration stop unit that decelerates and stops the robot when the contact state of the probe is detected.
[0026] The probe of the embodiment may have any structure as long as it can elastically displace in the direction in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More