

Automatic seedling picking paw mechanism and seedling picking method thereof
A technology of driving mechanism and gripper, which is applied in the field of automatic seedling picking gripper mechanism and its seedling picking, can solve the problems of small seedling spacing and missing, and achieve the effect of simple structure, ingenious structure and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
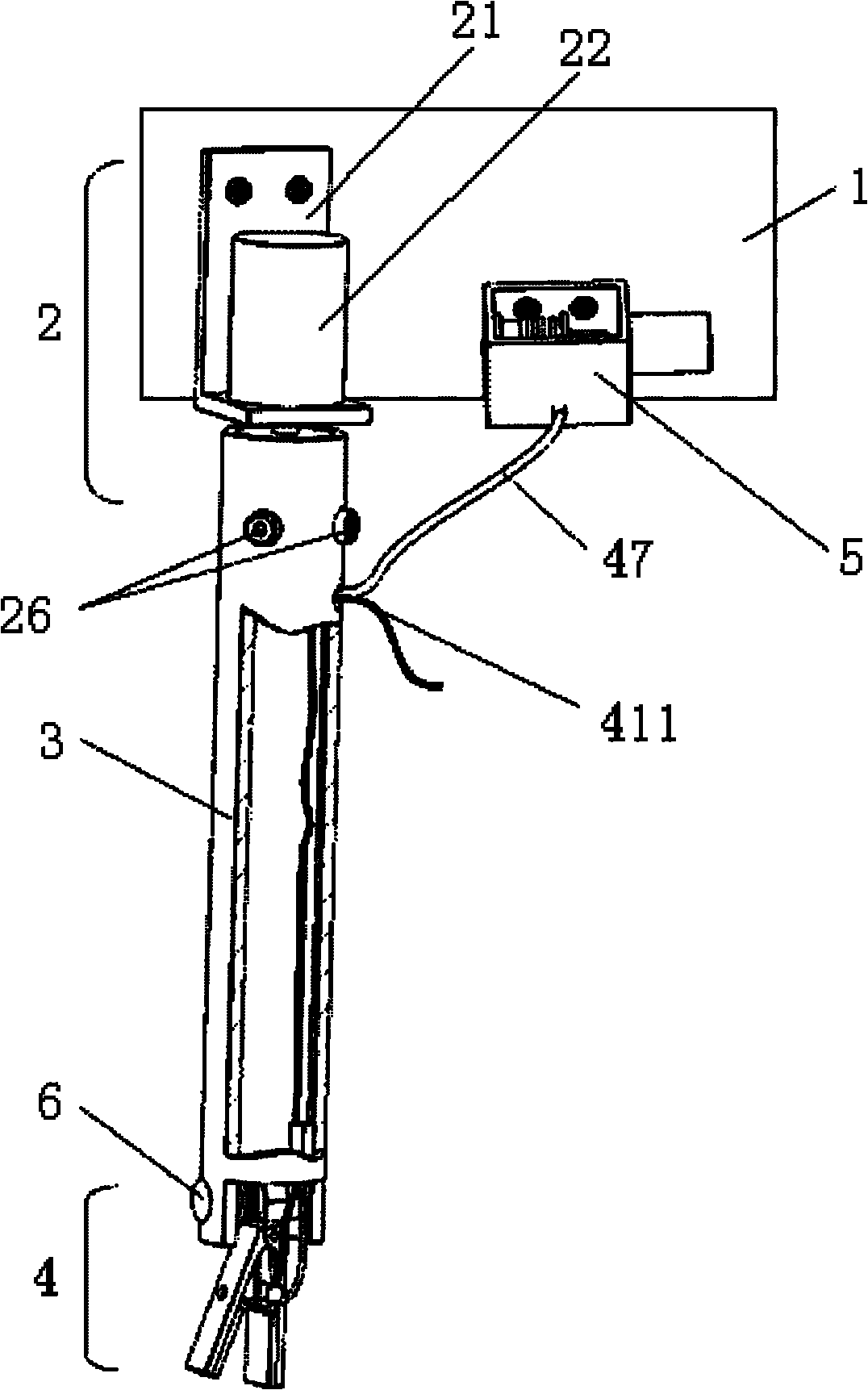
[0024] Such as figure 1 As shown, the present invention includes a base 1 , a claw rotating mechanism 2 , a claw arm 3 , a clamping mechanism 4 and a clamping driving mechanism 5 . The claw rotating mechanism 2 and the clamping driving mechanism 5 are fixed on the base 1, the lower end of the claw rotating mechanism 2 is fixedly connected to the claw arm 3, and the lower end of the claw arm 3 is radially pierced and fixed with a pin shaft 6, clamping The holding mechanism 4 is hinged on the pin shaft 6.
[0025] The base 1 can be the end of the Z axis of the three-degree-of-freedom rectangular coordinate robot, so that the clamping mechanism 4 can be driven to directly above the culture bottle.
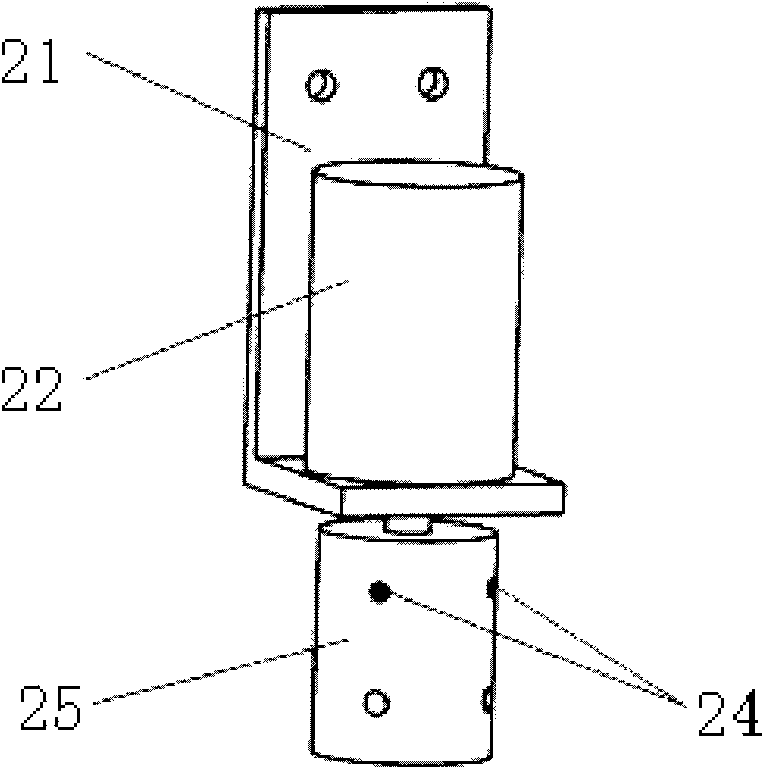
[0026] Such as figure 1 , figure 2 As shown, the claw rotation mechanism 2 includes a connection bracket 21 fixedly connected to the base 1 by screws, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More