

Throwing robot with changeable shape
A robot and variable technology, applied in the field of robotics, can solve problems such as narrow observation range, low camera sight height, robot damage, etc., to achieve the effect of improving sight range, expanding reconnaissance space, and flexible movement capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The following describes the present invention in detail with reference to the drawings and specific embodiments.
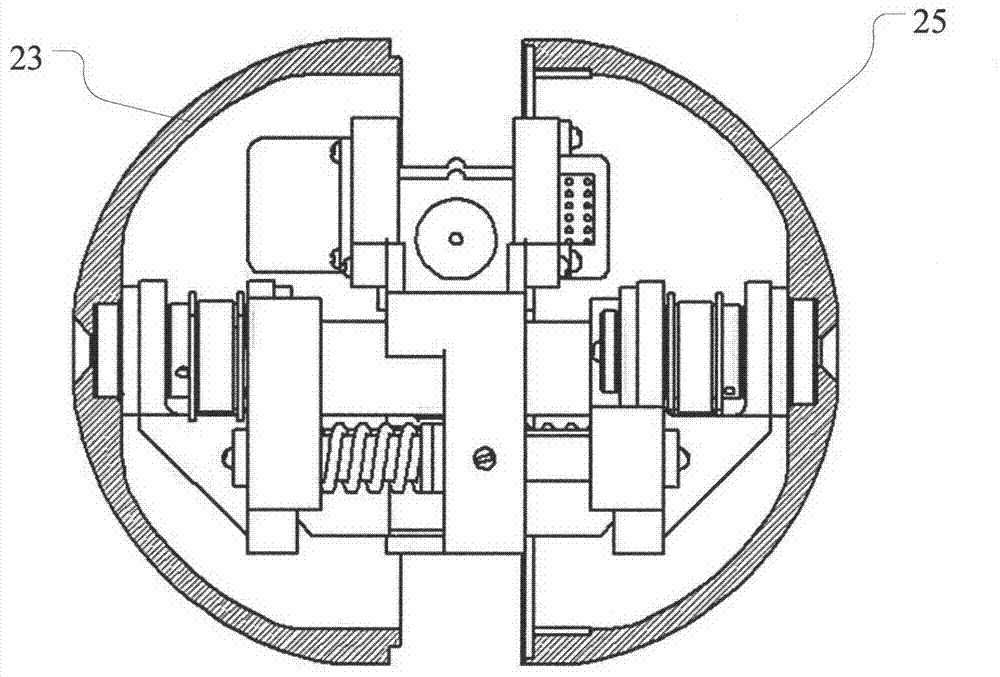
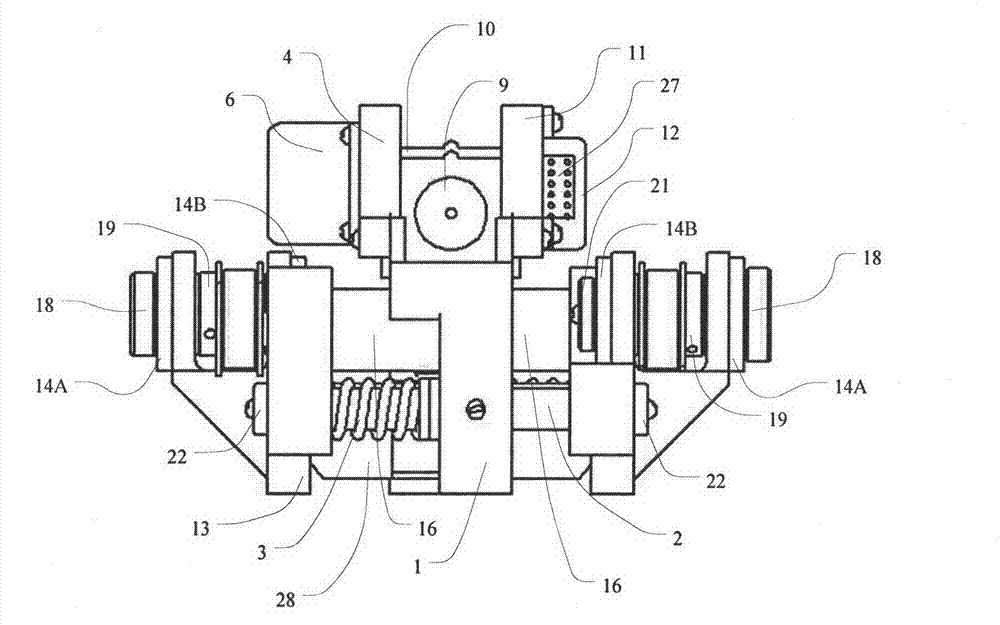
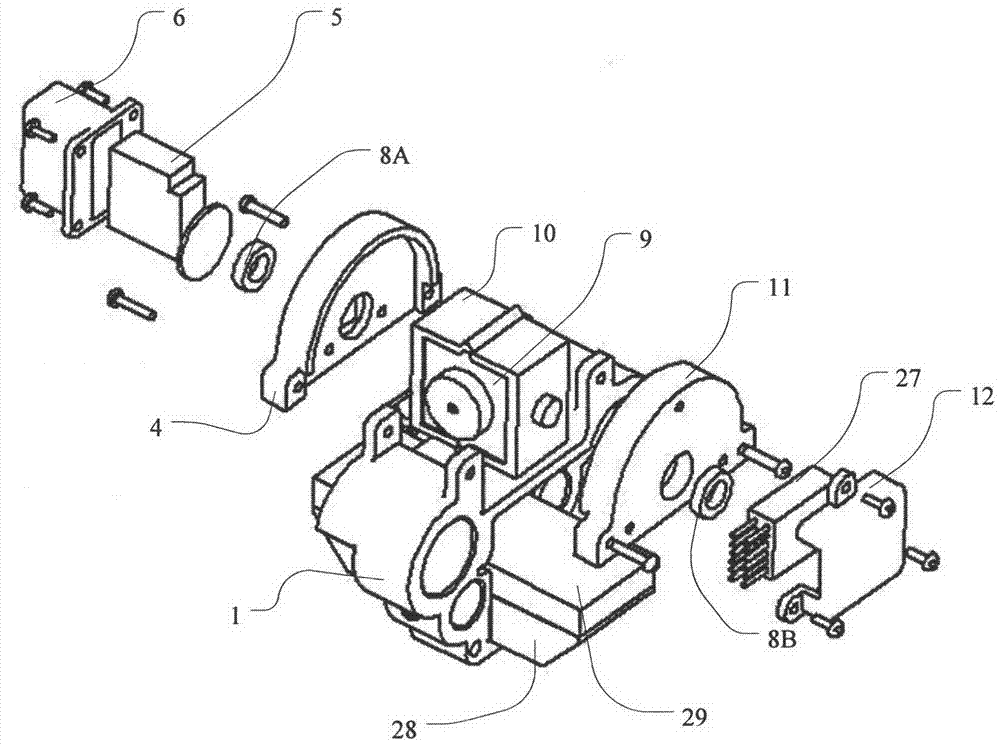
[0037] Reference figure 1 , figure 2 As shown, the variable-shape throwing robot of the present invention mainly includes three parts: a housing part, an actuator part, a camera head, and a power control part; the actuator part, the camera head, and the power control part are all arranged in the housing. In order to ensure a good view of the camera 9 inside the part, the camera head is fixed above the actuator part.
[0038] Such as figure 1 As shown in, the shell part is two half-shells 23 and 25, which should be symmetrical. In order to enable them to rotate and travel under the drive of the axle 18 after opening, the two half-shells 23 and 25 are axisymmetric The semi-closed structure of the shape, the symmetry axis is set horizontally and coincides with the axis of the wheel shaft 18. As a preferred solution, the two half shells 23 and 25 are both hemispher...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More