

Camel foot simulated mechanical foot device
A technology of mechanical feet and camels, applied in the field of mechanical design, can solve problems such as difficulty in walking, and achieve the effect of convenient and rapid switching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
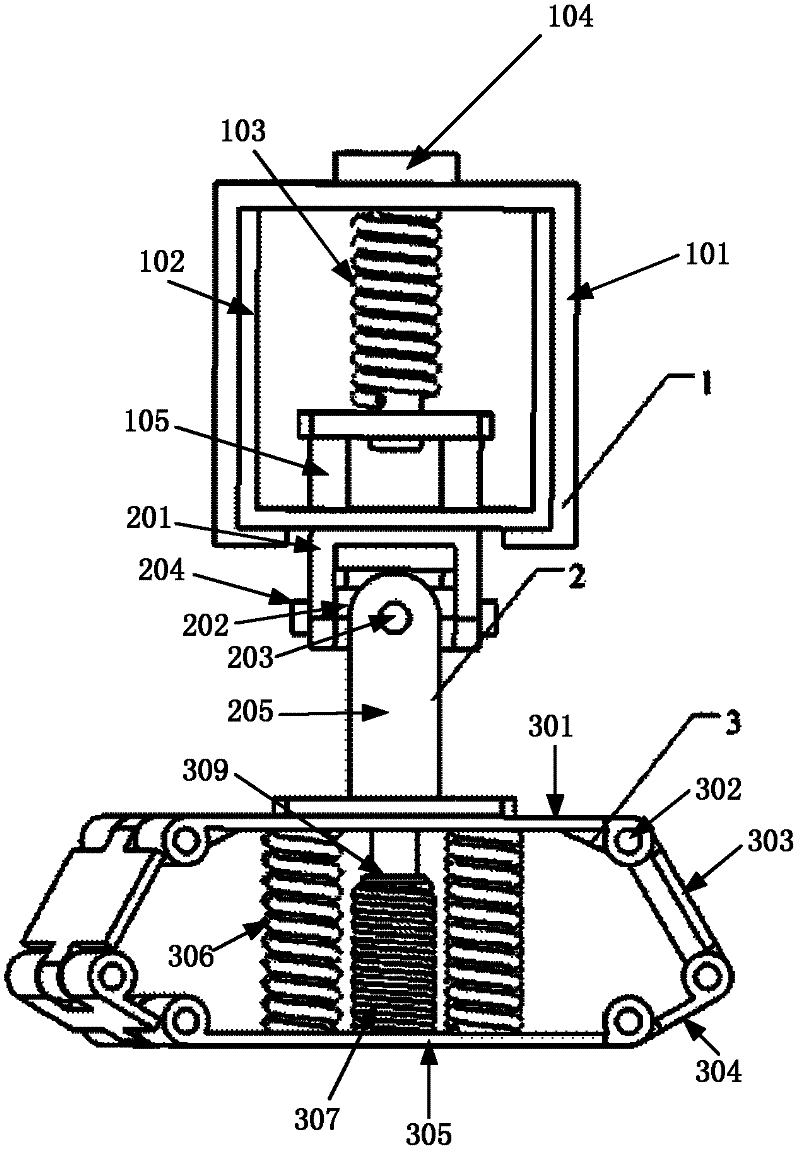
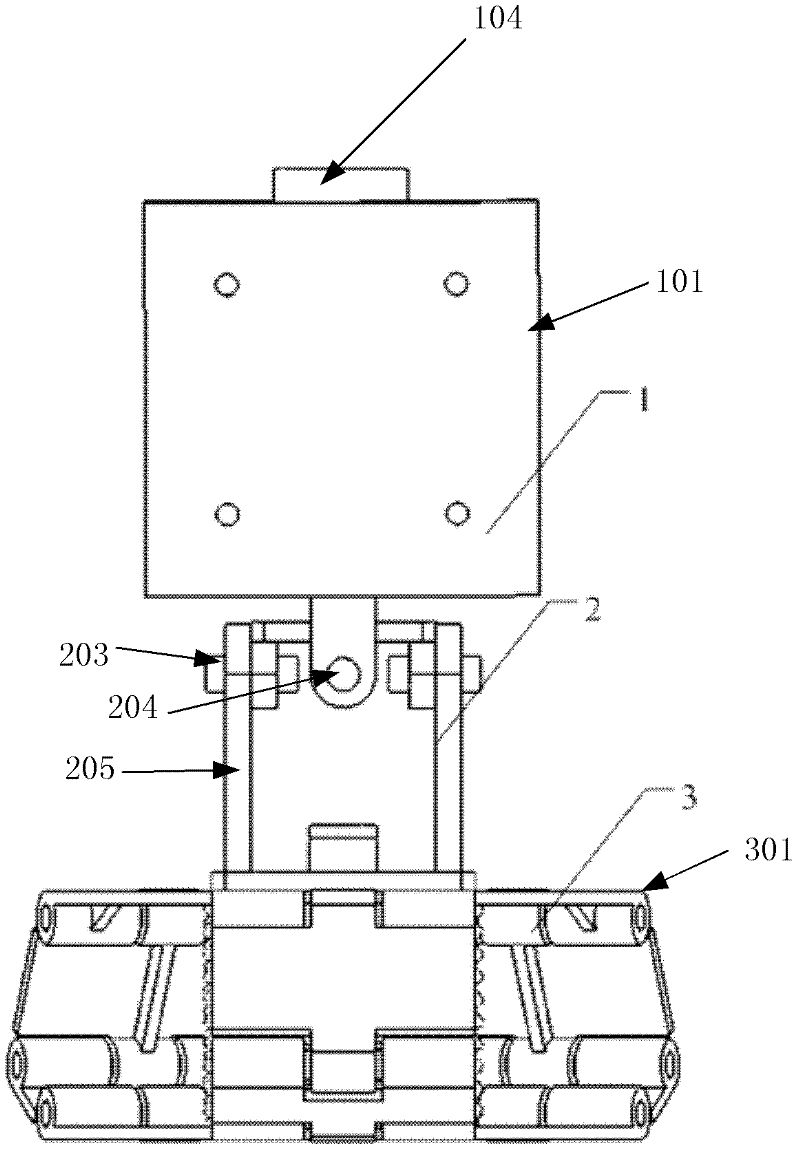
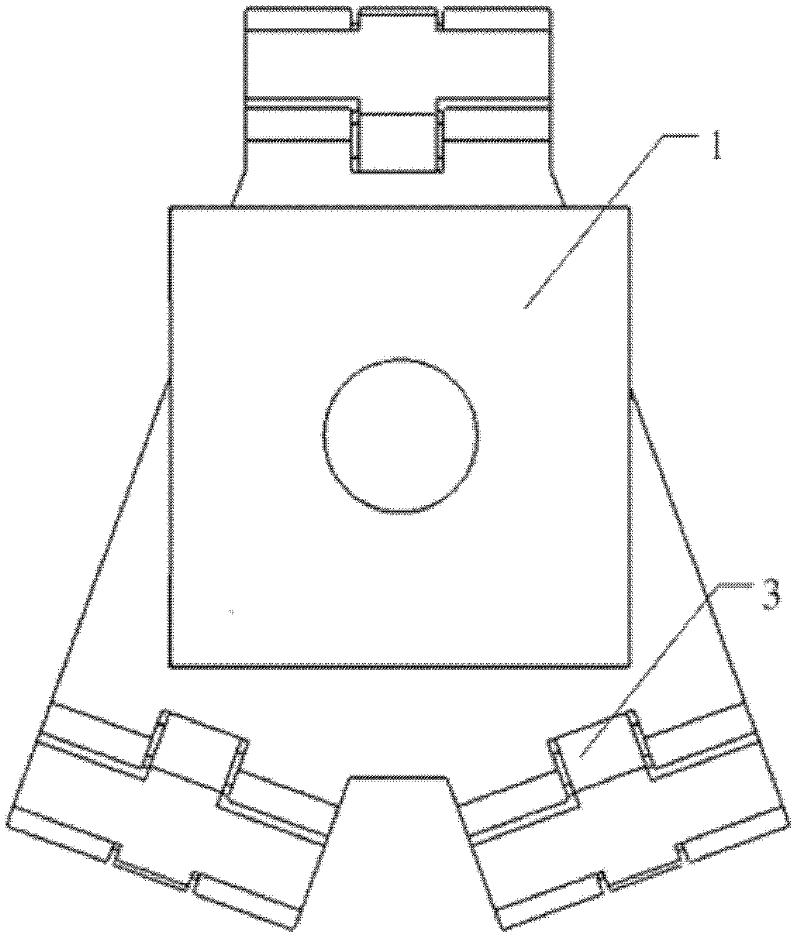
[0032] The present invention is a kind of imitation camel foot mechanical foot device, such as figure 1 , figure 2 , image 3 As shown, including mechanical interface 1, ankle joint 2 and sole 3;
[0033] mechanical interface 1 such as Figure 4 As shown, it includes an interface shell 101 , an interface inner shell 102 , a preload spring 103 , a preload spring guide rod 104 and a latch 105 .
[0034] The left and right sides of the interface housing 101 are connected to the legs of the robot by screws, and the upper end is provided with a threaded through hole, and a pre-tension spring inverted rod 104 is installed, and a pre-tension spring 103 is installed on the periphery of the pre-tension spring inverted rod 104, and a latch 105 is installed on the lower end, and the pre-tension spring 103. The bolt 105 can move up and down along the pre-ten...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More