

Obstacle breaking and demining robot
A robot and barrier-breaking technology, applied in the field of robots, can solve problems such as inability to put TNT explosives, no installation facilities, prone to rollover, etc., and achieve good walking effect, reasonable structural design, and convenient use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The implementation of the present invention will be illustrated by specific specific examples below, and those skilled in the art can easily understand other advantages and effects of the present invention from the contents disclosed in this specification.
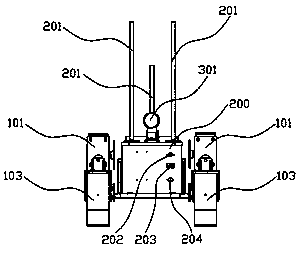
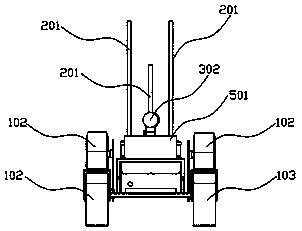
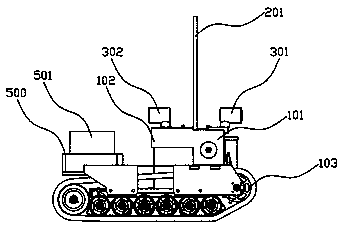
[0028] according to Figure 1 to Figure 7 Shown: the present embodiment provides a kind of obstacle-destroying robot, comprises vehicle frame 400, crawler belt walking assembly, control box 200 and delivery mechanism, wherein, control box 200 and delivery mechanism and vehicle frame 400 are connected as a whole, and vehicle The crawler belt travel assembly is installed on both sides of the frame 400, and the specific implementation structure of each component is described as follows.
[0029] The vehicle frame 400 as a whole is a frame structure composed of profiles connected to each other. Its top forms a plane, and its two sides are used to assemble and connect with the crawler walking assembly to form a whole.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More