

Three-freedom-degree series-parallel omni-directional mobile transfer robot
A technology for handling robots and omnidirectional movement, which is applied in the field of robotics and can solve the problems of joint error accumulation, heavy arms, large inertia, etc., and achieve the effects of increasing stiffness, smooth movement, and improving carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the technical means, creative features, objectives and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments and illustrations.
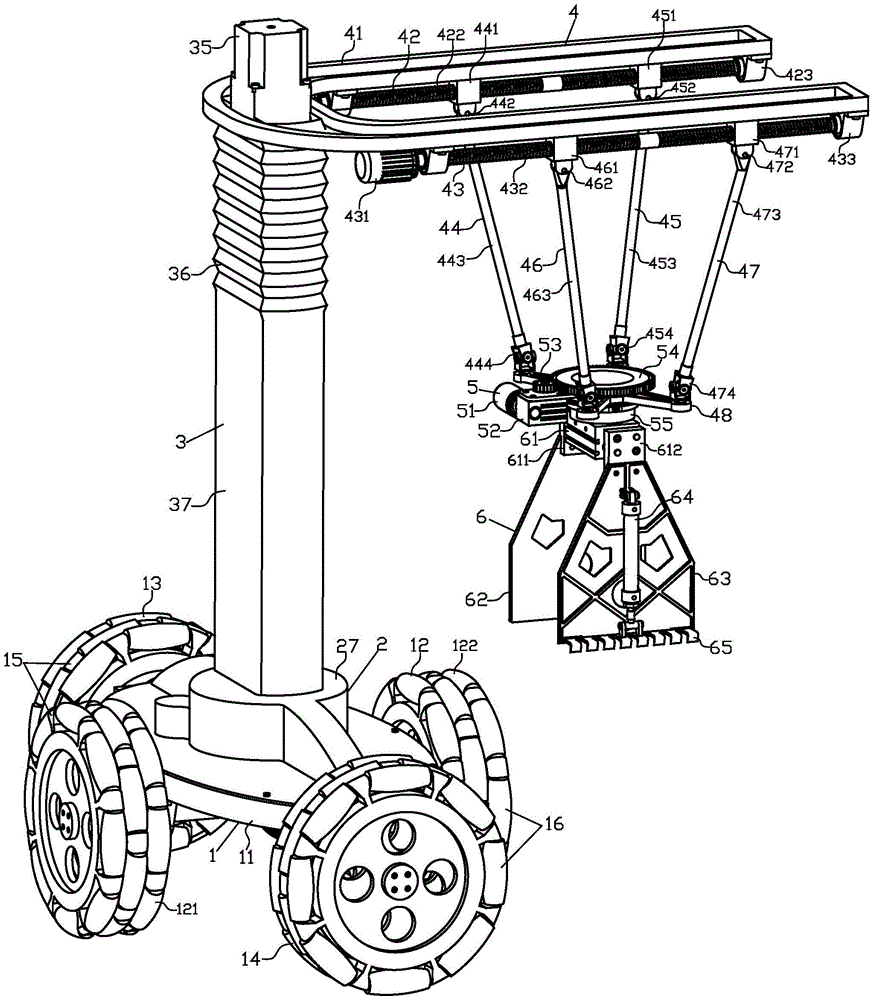
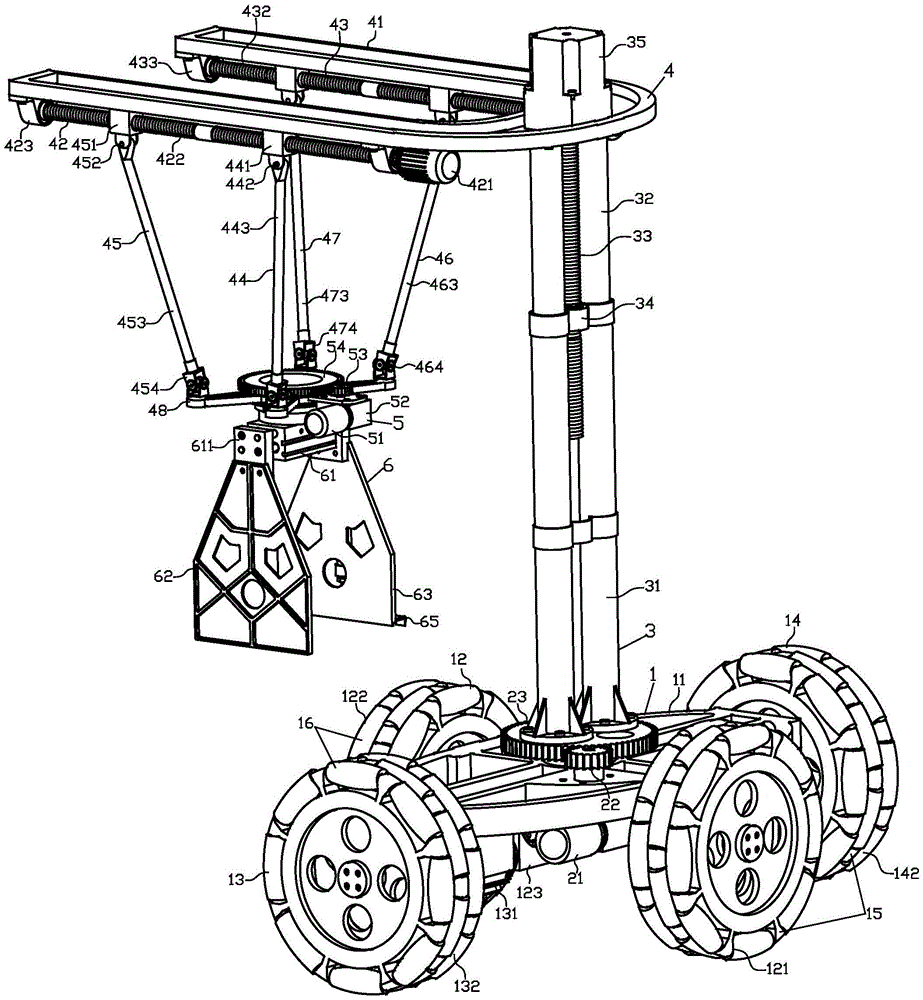
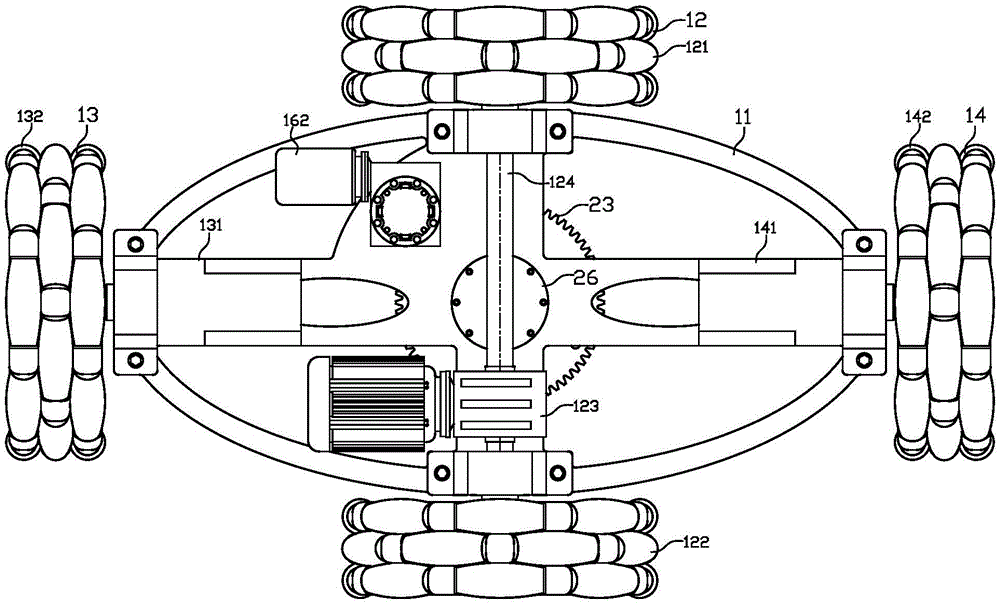
[0035] Such as figure 1 and figure 2 As shown, a three-degree-of-freedom hybrid omnidirectional mobile handling robot includes an omnidirectional mobile chassis 1 , a main rotary device 2 , a lifting device 3 , a parallel working arm 4 , an end rotary device 5 and a gripper 6 . Wherein, the lifting device 3 is located directly above the omnidirectional mobile chassis 1, and is connected with the omnidirectional mobile chassis 1 through the main turning device 2; the parallel working arm 4 is located on one side of the lifting device 3, and its The upper end is fixed on the top of the lifting device 3 , and the lower end of the parallel working arm 4 is connected with the clamper 6 through the end turning device 5 .
[003...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More