

Dual-V-shaped variable-track obstacle crossing mechanism based on ellipse principle
An ellipse and crawler technology, applied in the field of variable crawler-type obstacle-climbing mechanisms, can solve problems such as low movement speed, cumbersome control, and complex structure, and achieve the effects of strong structural deformation ability, simple mechanism design, and broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings.
[0031] Principles on which the present invention is based:
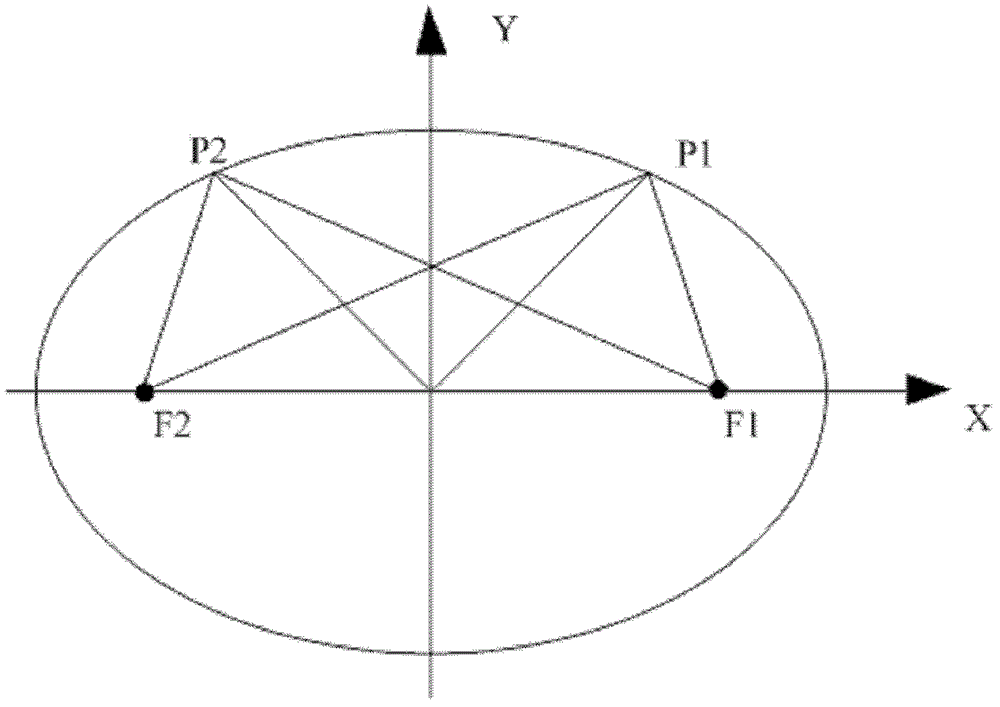
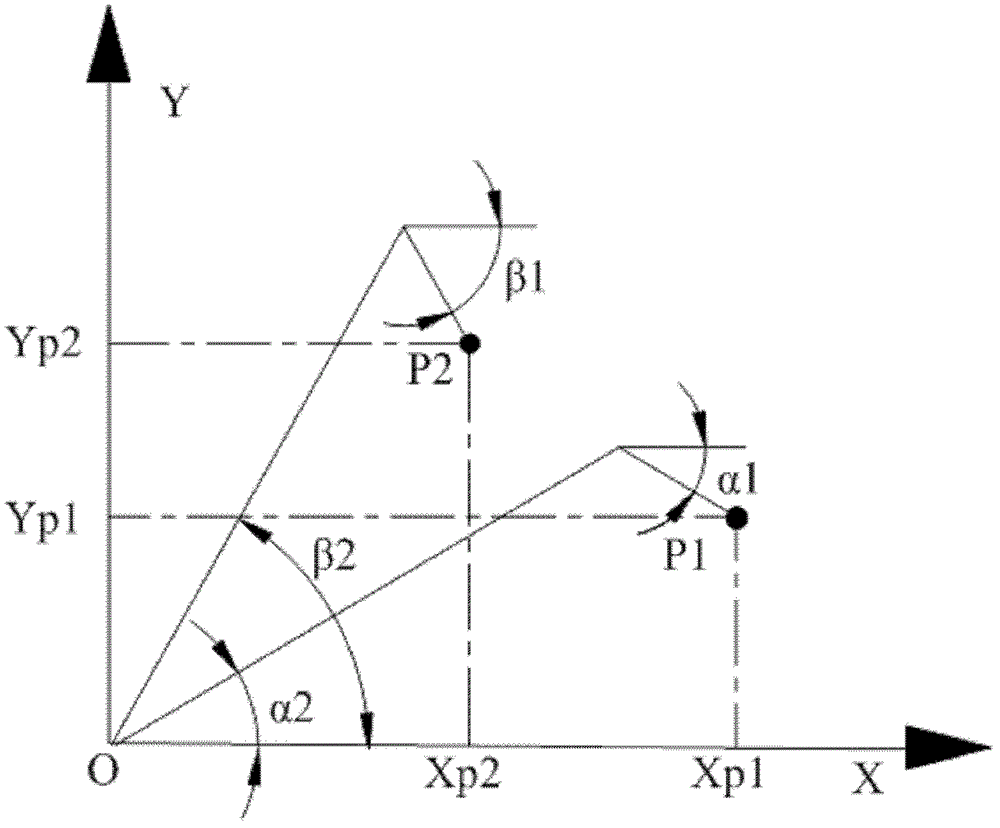
[0032] According to the properties of the ellipse, let p 1 is any point on the ellipse (see figure 1 ), F 1 , F 2 as the focal point, we can get p 1 f 1 +p 1 f 2 and is a constant 2a. triangle p 1 f 1 f 2 The perimeter at the focal point F 1 , F 2 When determined, it is also a constant, then about the y-axis and P 1 Symmetrical P 2 The points also satisfy the above mathematical relationship, then the two triangles formed by the six points are symmetrical about the y-axis. if p 1 ,p 2 Satisfy this relation at all times, then when p 1 ,p 2 During motion, the center moves up and down dynamically on the y-axis.
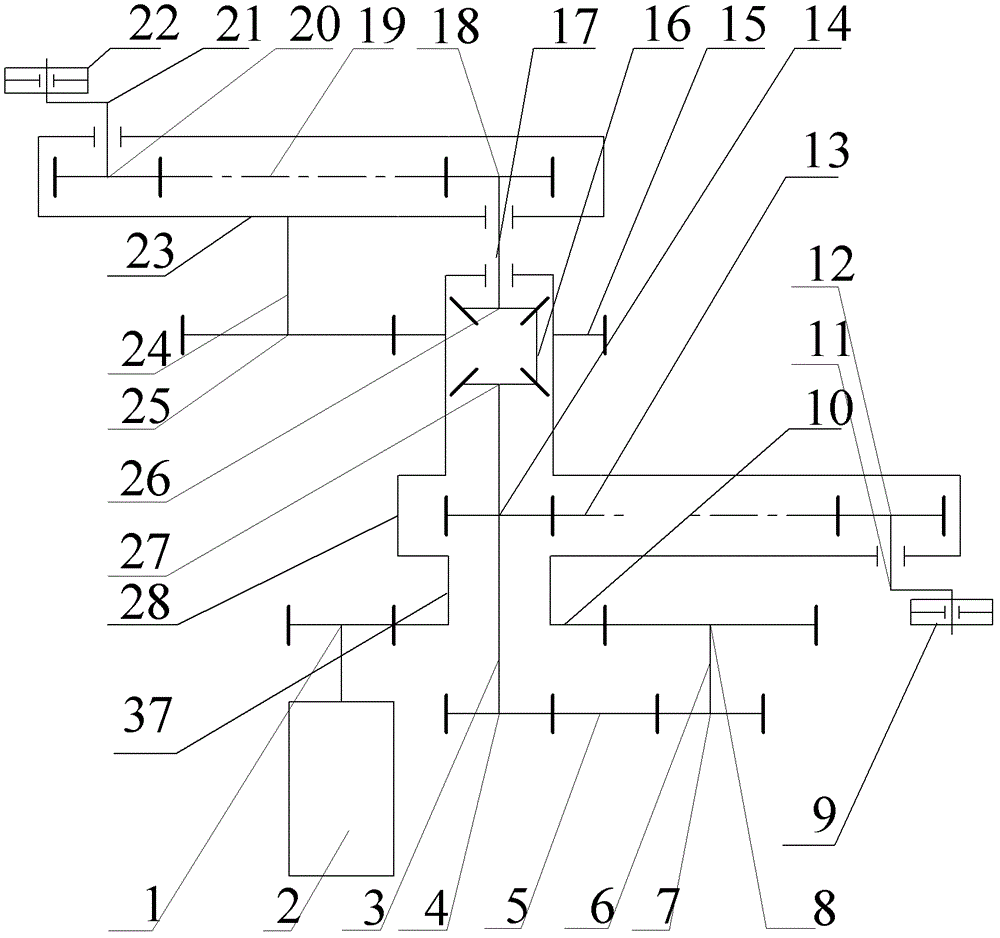
[0033] In the ellipse geometric relationship of this mechanism (see figure 1 , Figure 4 ). On the one hand, the driving wheel I 35 and the driving wheel II 32 are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More