

Method for cooperatively detecting moving target by using multiple unmanned aerial vehicles
A moving target, multi-UAV technology, applied in the field of collaborative reconnaissance of moving targets based on UAVs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0064] The method for cooperative reconnaissance of a moving target by an unmanned aerial vehicle of this embodiment includes the following steps:
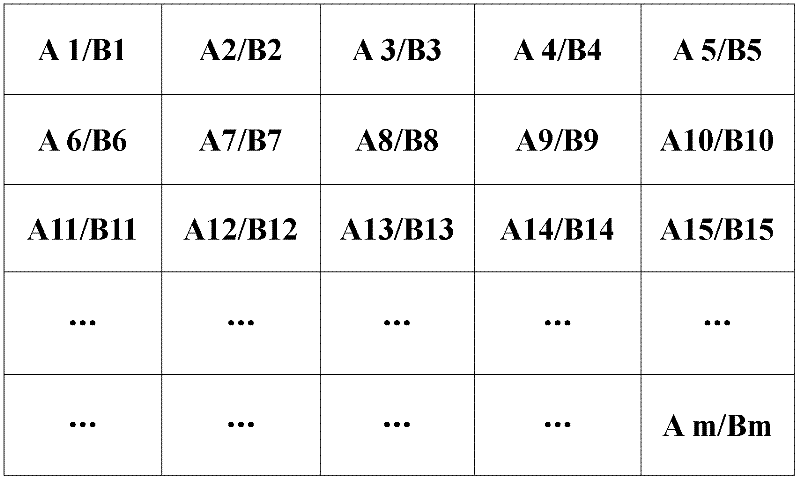
[0065] Step 1: Divide the area to be reconnaissance into a group of sub-areas of the same size, the number of the sub-areas is the same as the number of the UAVs, and each UAV has the same configuration; such as figure 1 As shown, in this embodiment, the area to be reconnaissance is A, which is pre-divided into A1, A2, A3, . B3,...,Bm, where m is a natural number.
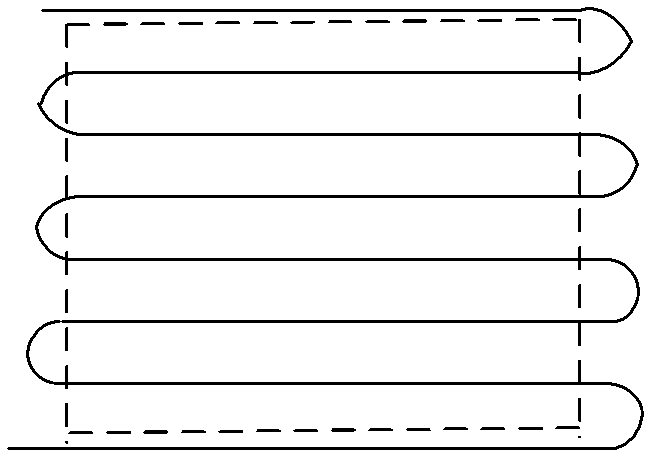
[0066] Step 2: Each UAV conducts reconnaissance on the moving target in the corresponding sub-area. In order to accurately detect the moving target in the sub-area, a global search method is adopted, and the number of turns in the searched planning route should be designed to be higher. The less the better, in order to reduce the number of turns in the global search as much as possible, the designed search route is as follows figure 2 As shown, the dotted line is th...
Embodiment 2
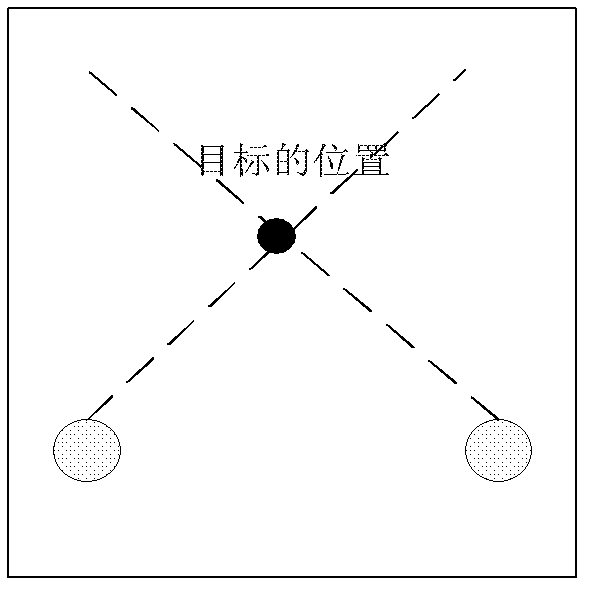
[0073] The method steps of this embodiment are basically the same as those of the first embodiment, except that in step 4, two UAVs B13 and B9 have completed their respective reconnaissance tasks. Entering the sub-area A8 at the same time, there are three UAVs in the sub-area A8 for cooperative reconnaissance. like Figure 4 As shown, the direction lines to the target measured by the three UAV angle sensors will form a triangular area, and the center of the area is the position of the measured target.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More