

Manipulator arm locking device for planetary exploration
A technology for locking devices and robotic arms, which can be used in manipulators, claw arms, manufacturing tools, etc., and can solve the problem of consuming more power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0022] For the application background of this example, please refer to "A Multifunctional Robot Arm for Planetary Exploration Vehicle" (invention patent application number: 201110137930.8).
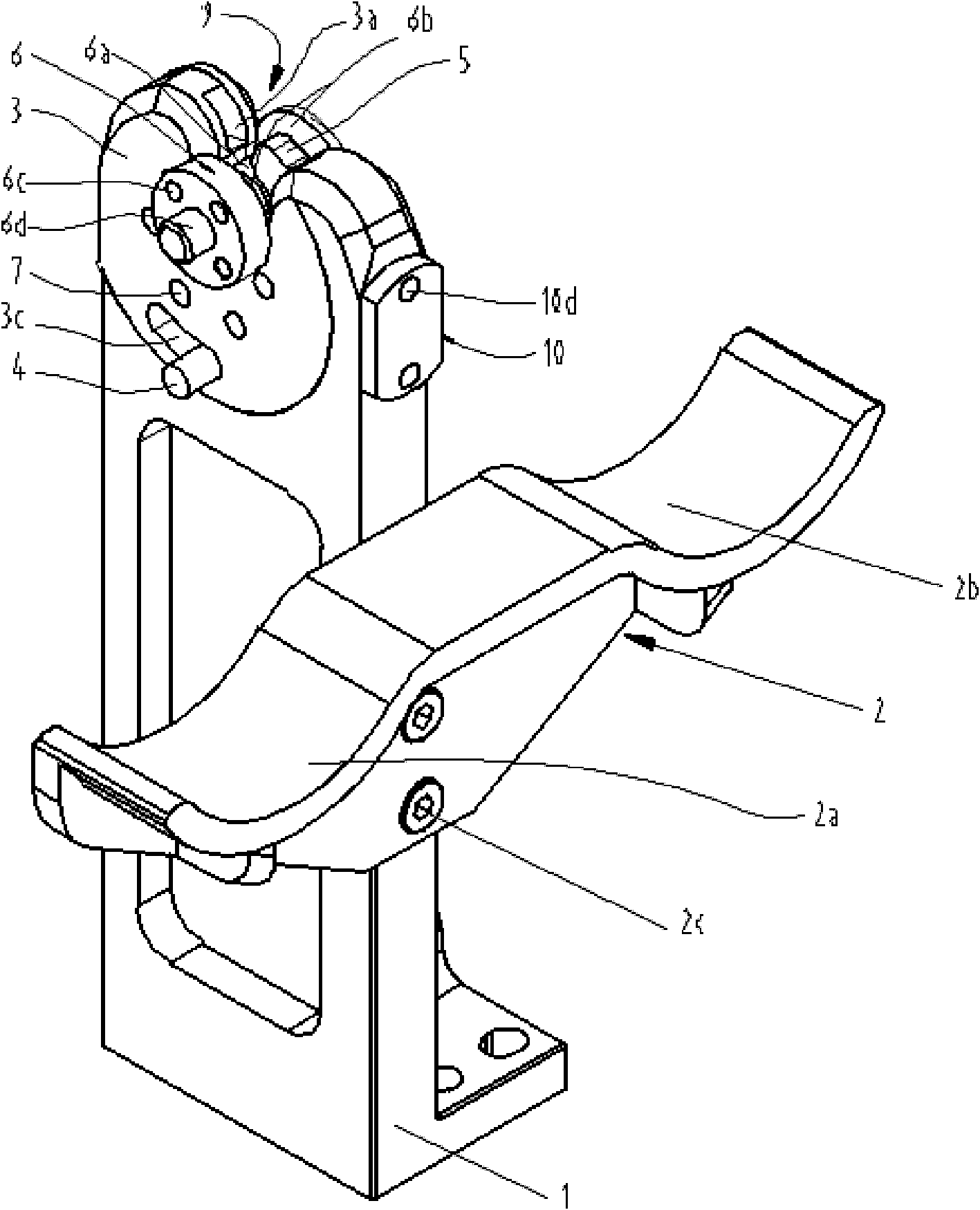
[0023] figure 1 It is a perspective view of the appearance of the present invention, and the device is composed of a bracket 1, a bracket 2, a lock plate 3, a lock 5, a dial pin 4, a lock pin 6, a positioning mechanism 10, and the like. Wherein, the lock pin 6 is connected with the front end support of the mechanical arm by the pin shaft 6d at one end and the screw hole 6c ( Figure 5 ), the bracket 2 is used for the support when the mechanical arm is retracted, the bracket 1 provides the support and installation of the locking device and the bracket 2, and is combined with the lock plate 3 to process a trumpet-shaped lock pin groove 9, and the bracket 1 and The bracket 2 is integrated, which is beneficial to simplify the mechanism and reduce the weight.
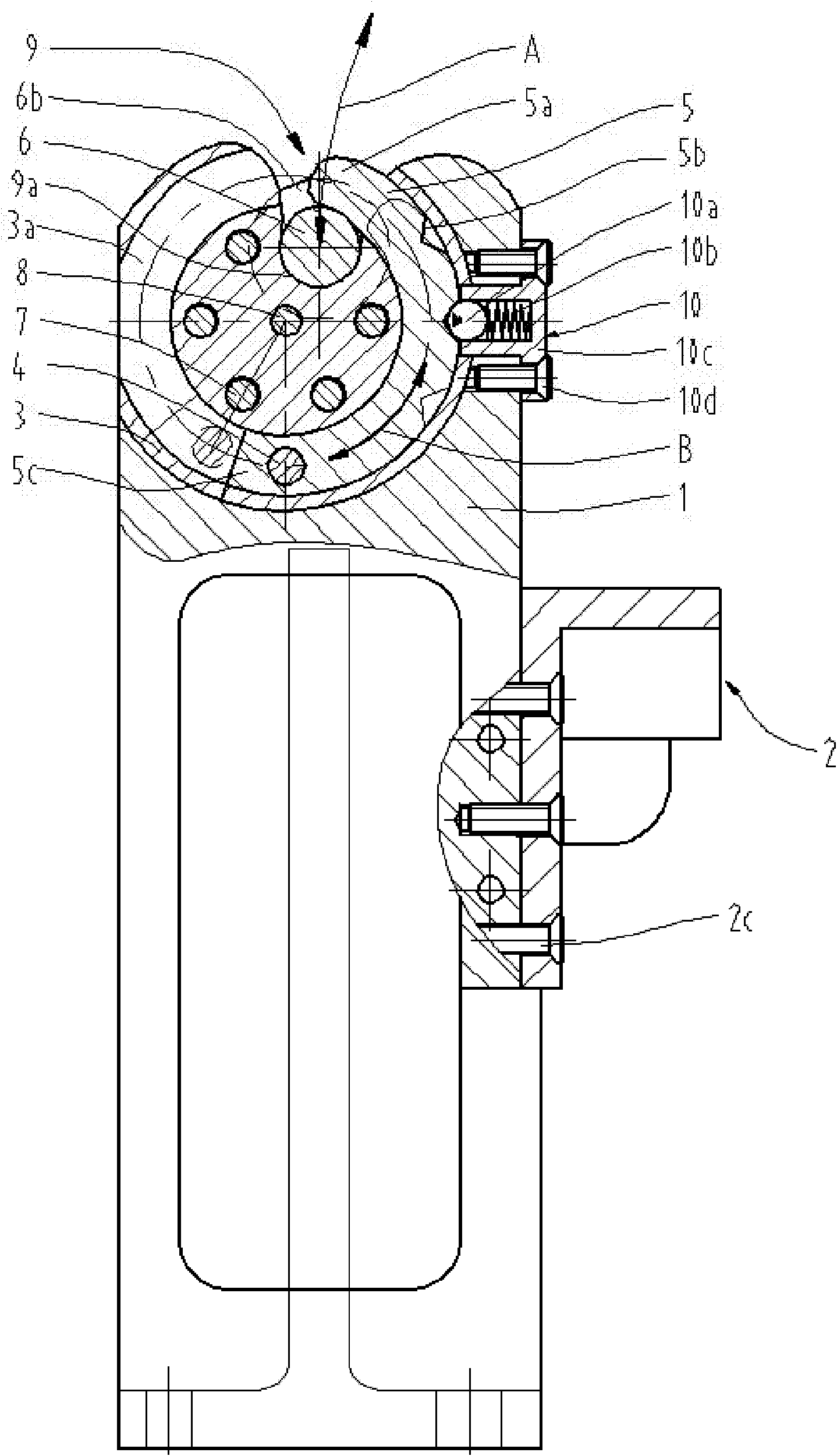
[0024] figure 2 for figure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More