

System error correction method of autonomous navigation sensor by using yaw maneuvering
A technology of autonomous navigation and system error, applied in the direction of integrated navigator, etc., can solve the problem of poor observability of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
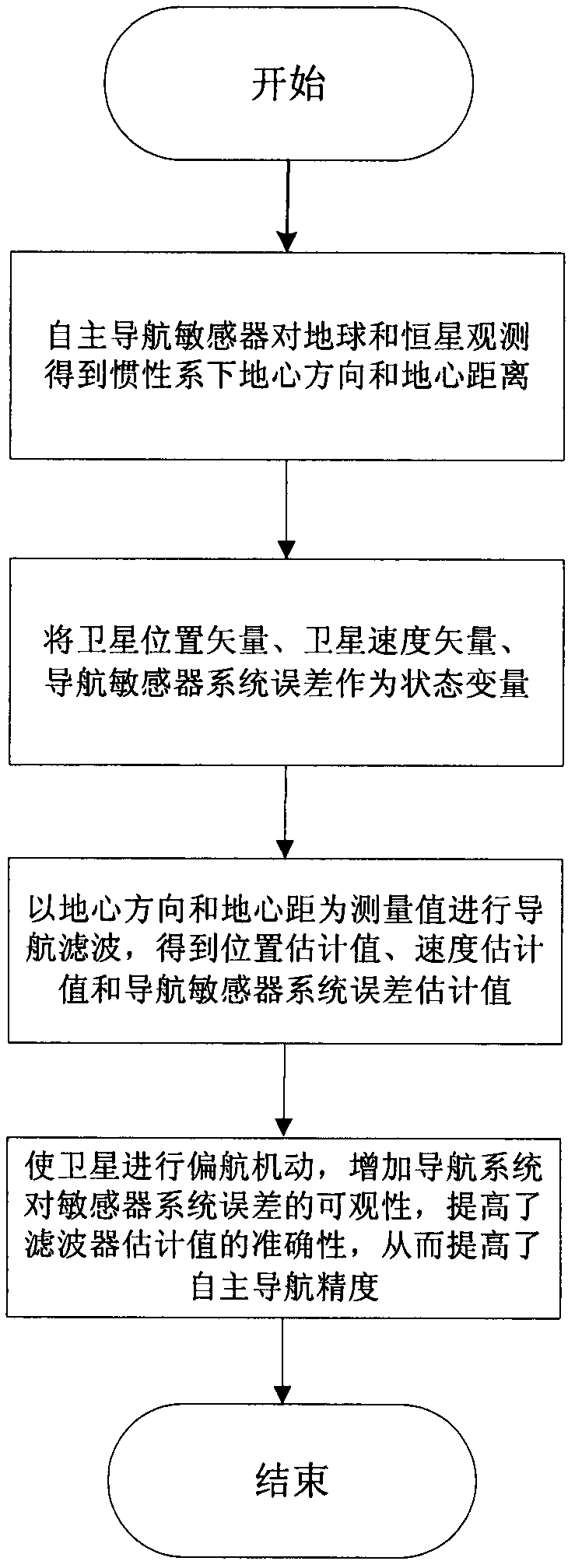
[0049] Such as figure 1 Shown, the present invention is concretely realized as follows:
[0050] (1) Define the coordinate system: the origin of the inertial system is at the center of the earth, the positive direction of the X-axis is along the intersection line between the equatorial plane and the ecliptic plane of the earth, pointing to the vernal equinox, the Z-axis is the normal line of the equatorial plane, and the positive direction points to the North Pole, and the Y-axis and The X and Z axes form a right-handed system; the origin of the orbital system is at the center of mass of the satellite, moving along the orbit with the satellite, the Z-axis points to the center of the earth, the X-axis is perpendicular to the Z-axis and points to the satellite speed direction, and the Y-axis forms a right-handed relationship with the X and Z axes system; the satellite system is a coordinate system established based on the satellite structure, the origin is a point fixed on the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More