

Active light-emitting type target for automatic calibration based on machine vision and calibrating method thereof
An automatic calibration and machine vision technology, applied in the field of computer vision, can solve problems such as complex program algorithms, missed calibration points, misjudged calibration points, etc., and achieve the effect of accurate internal and external parameters and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] specific implementation plan
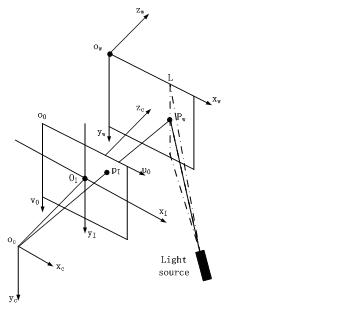
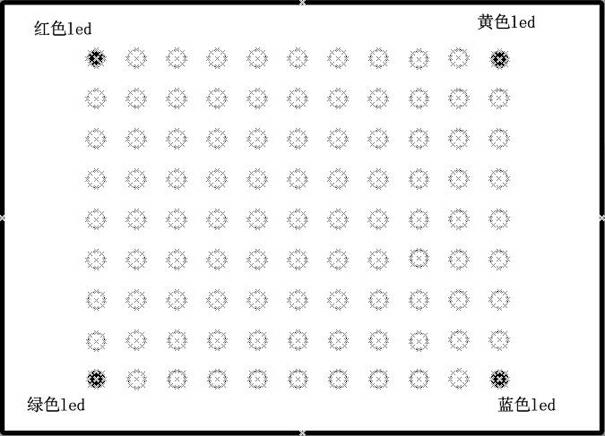
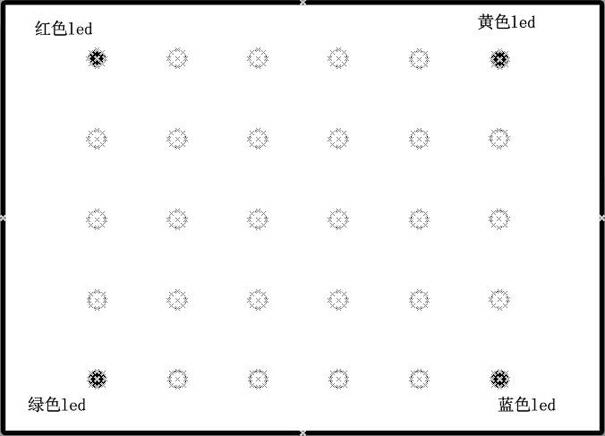
[0023] The target designed by the present invention is embedded with several light-emitting small lights arranged in a rectangular lattice, for example, the distribution of rows and columns is 9x11. All the small lights are arranged at equal intervals in the horizontal and vertical directions. The small lights on the four vertices of the rectangle are distinctive and have different colors. Each small lamp is controlled by an independent switch, and the switch of the small lamps in the array can be controlled by the program later.
[0024] The specific calibration process is as follows:
[0025] Step 1: Place the target at different positions in the field of view of the camera, and take multiple sets of color images. Each location takes a picture of the small light on and off. When shooting, use the main switch to control the small lights, and the position of the target in each group of pictures remains unchanged.
[0026] Step 2: First...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More