

Rapid and continuous collision detection method based on K_DOPs (k-discrete orientation polytopes)
A collision detection, fast technology, applied in error detection/correction, instrumentation, electrical digital data processing, etc., can solve problems such as puncture, missed detection, etc.
Active Publication Date: 2012-07-25
SOUTH CHINA UNIV OF TECH
View PDF3 Cites 12 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The discrete method is to determine the collision situation by calculating the state of each time point regularly, but this method will cause puncture and missed detection
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
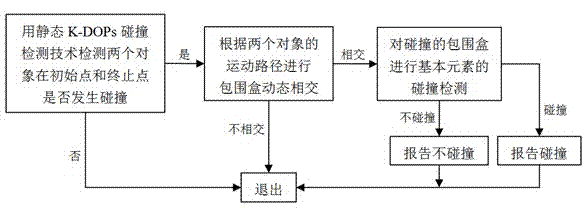
[0032] The present invention is based on K_DOPs rapid continuous collision detection method and comprises the following steps:
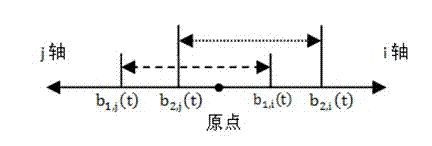
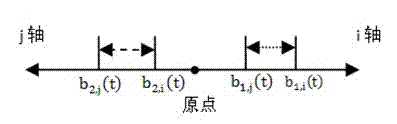
[0033] S1. Given the initial time point and the end time point, use the static K_DOPs collision detection technology to detect whether two objects collide at the initial point and the end point, and if there is a collision, exit. Otherwise, go to step 2.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention provides a rapid and continuous collision detection method based on K_DOPs (k-discrete orientation polytopes), which includes the steps: (1) presetting an initial time point and a terminal time point, detecting whether two objects are collided or not at the initial time point and the terminal time point by means of static K_DOPs collision detection technology, exiting if the objects are collided and going to a second step if not; (2) detecting dynamic intersection of bounding boxes according to motion paths of the two objects; (3) exiting if the K_DOPs bounding boxes of two subintervals are not intersected and going to a fourth step if the K_DOPs bounding boxes are intersected; (4) detecting collision of basic elements of the colliding bounding boxes; and (5) reporting collision and exiting if the basic elements are collided, and reporting no collision and exiting if not. By the aid of the rapid and continuous collision detection method, collision of two rigid bodies during continuous movement can be detected in real time, omission and piercing in discrete detection can be avoided, detection results can be more reliable, and precision and performance are high.
Description
technical field [0001] The invention belongs to the field of robot motion, in particular to a method for real-time collision detection when a robot is moving. Background technique [0002] Collision detection algorithms have a long research history in the field of robot motion, and real-time collision detection is a very critical issue in the field of robotics. At present, there are many feasible collision detection algorithms, but with the emergence of emerging fields such as virtual reality and the subsequent improvement of people's requirements for real-time interaction and scene authenticity, the problems faced by collision detection technology are also increasing. Increasingly prominent, one of the core issues is how to effectively improve the speed of collision detection. [0003] The commonly used methods are mainly divided into two categories: discrete methods and continuous methods. The discrete method is to determine the collision situation by calculating the sta...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Applications(China)
IPC IPC(8): G06F11/00
Inventor 张平杜广龙
Owner SOUTH CHINA UNIV OF TECH