

Method for estimating and compensating lever arm effect in case of shaken base by strapdown inertial navigation system
A strapdown inertial navigation and lever-arm effect technology, applied in the field of inertial navigation systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
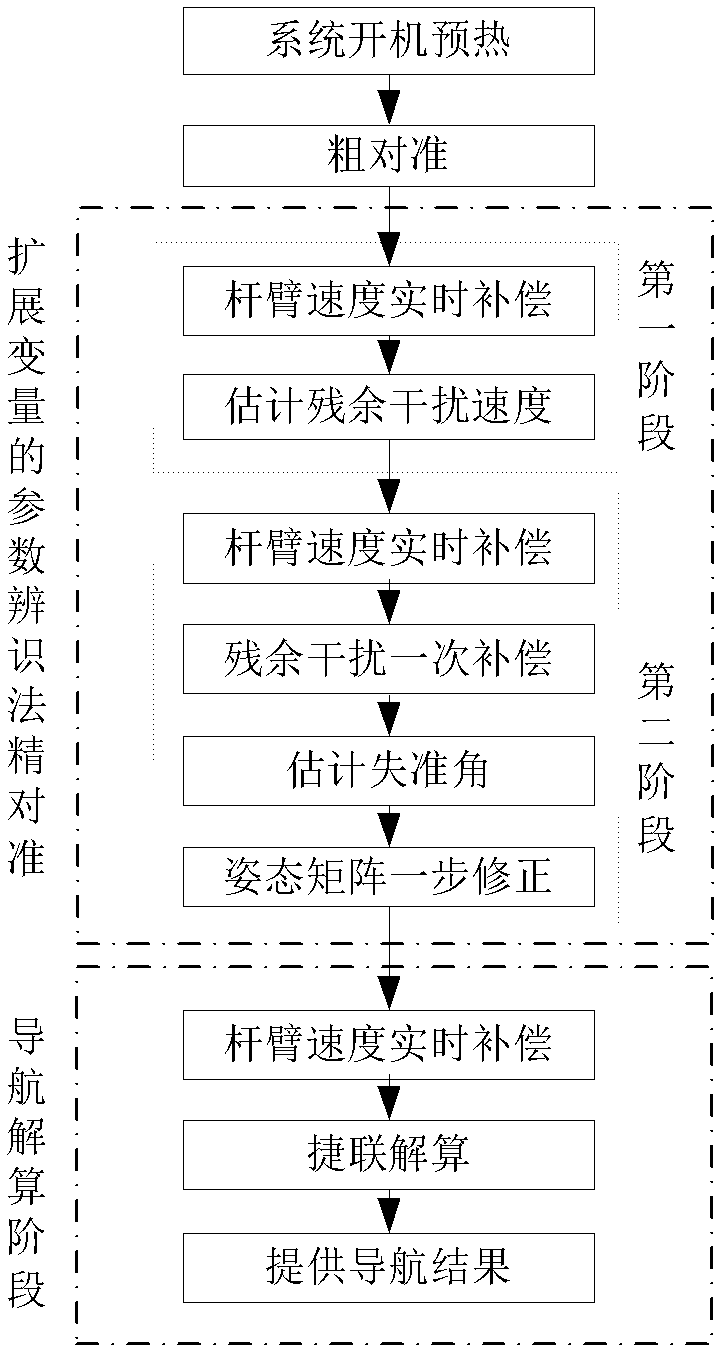
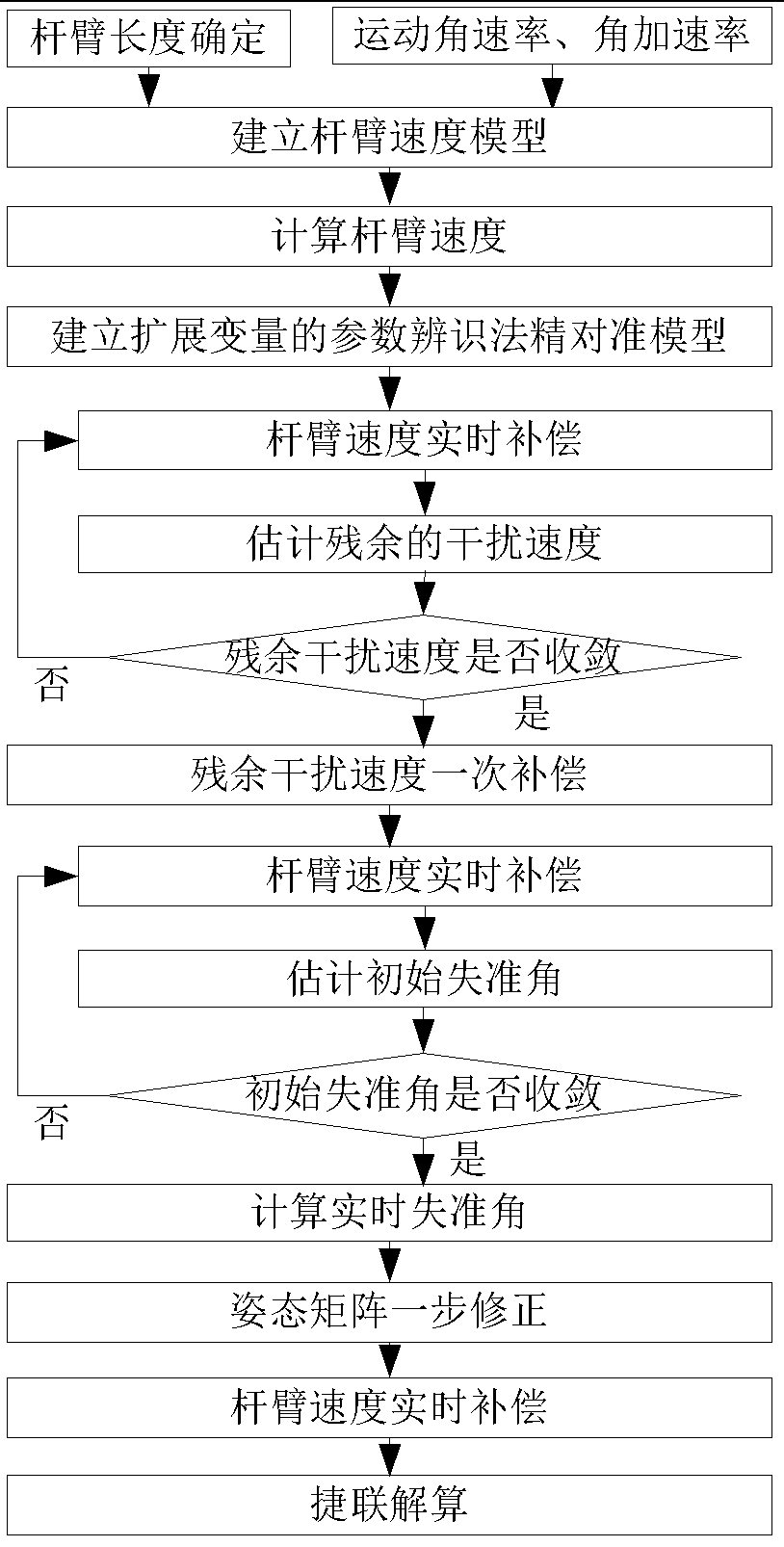
[0056] The implementation process of the present invention is described in detail below, and the flow process is as follows figure 1 shown.
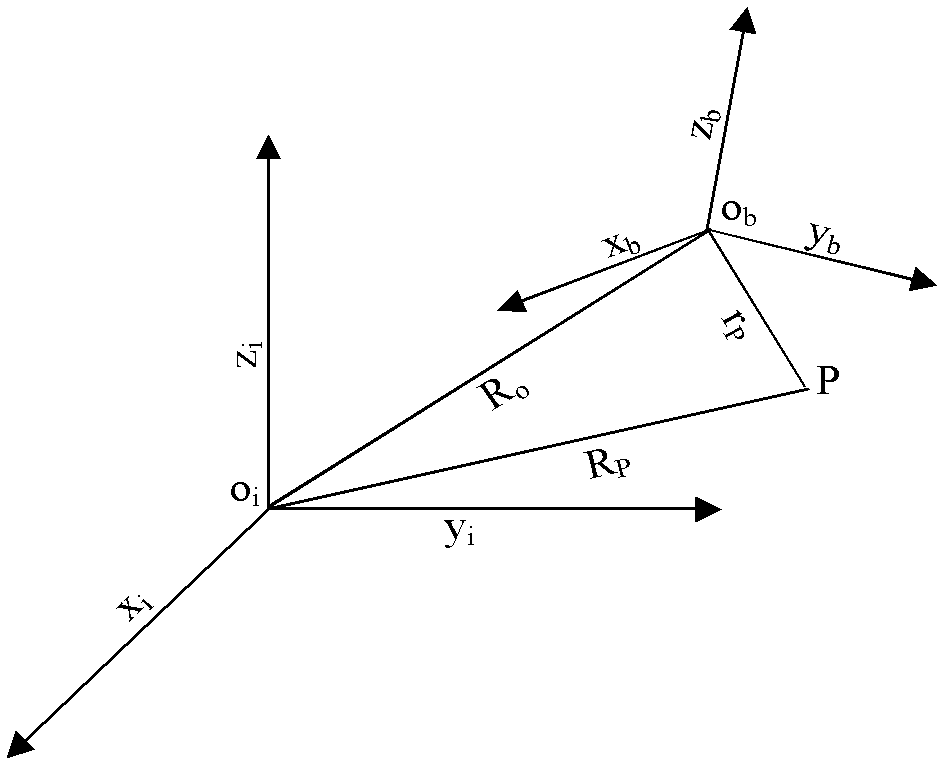
[0057] First define the coordinate system. Define the "Northeast Sky" coordinate system as the navigation coordinate system, denoted as n system; the carrier coordinate system b takes the center of gravity of the carrier as the origin, the X axis points to the right along the horizontal axis, the Y axis points forward along the vertical axis, and the Z axis points vertically to the carrier ;Earth coordinate system e system, the origin of the coordinate system is at the center of the earth, the X-axis is on the equatorial plane, pointing to the prime meridian, the Y-axis is perpendicular to the X-axis, and is also in the equatorial plane, and the Z-axis is determined by the right-hand rule, pointing to the earth's rotation axis direction. The geocentric inertial coordinate system i system, which coincides with the earth coordinate syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More