Method for determining the position of a self-propelled device
A technology of automatic movement and equipment, applied in two-dimensional position/course control, positioning, vehicle position/route/altitude control, etc., can solve the problems of positioning contribution, low mass weighting, etc., and achieve the effect of increasing the quantity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
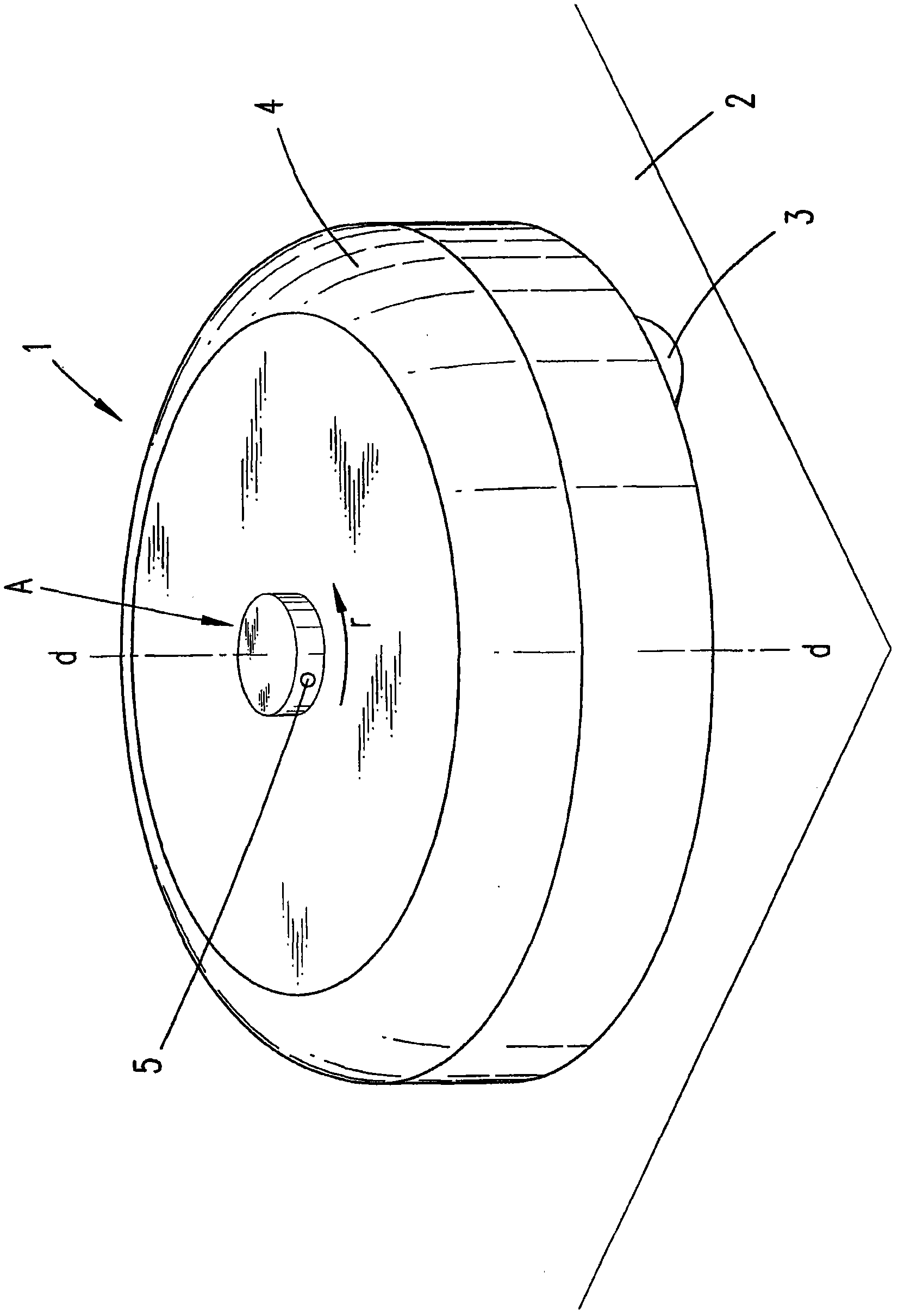
[0021] first with the help of figure 1 The device 1 is shown and described in the form of a vacuuming and / or sweeping machine, further in the form of an autonomously mobile household vacuuming robot. The device has a chassis, the underside of which faces the floor 2 to be cleaned, with motorized travel wheels 3 and likewise motorized brushes which preferably protrude beyond the lower edge of the underside of the chassis. The device cover 4 is snapped onto the chassis, the device having a circular plan view. With regard to the design of the device 1 as a vacuum and / or sweeper, see, for example, DE 10 242 257 A1 cited at the outset.
[0022] Furthermore, although not shown, the device 1 has a suction opening as an addition or alternative to the brush. In this case, an electric fan motor is additionally provided in the device 1 .
[0023] The electrical components of the device 1 are supplied by means of rechargeable accumulators, not shown, for example, the electric motors fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More