

A Parallel Real-time Simulation System for Tracked Vehicle Electric Drive System
A real-time simulation, electric drive technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as the inability to achieve dynamic real-time fast simulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention provides a realization method of a scalable parallel real-time simulation system for an electric drive crawler vehicle. The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
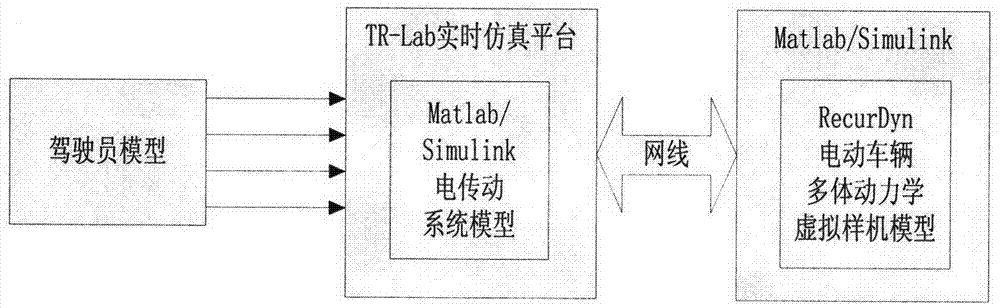
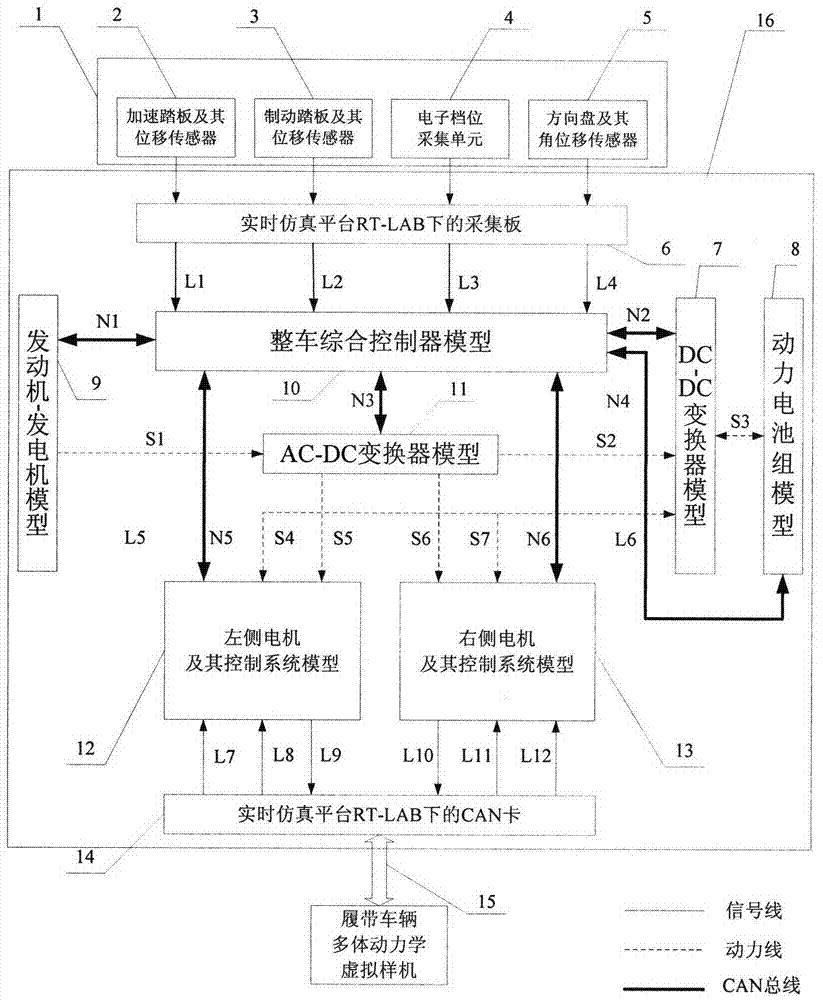
[0024]The invention is a parallel real-time simulation system model of multi-body dynamics of a crawler vehicle driven by double motors. Based on a certain car model as a prototype vehicle, build a MATLAB / simulink-based electric drive system model and a RecurDyn-based electric drive tracked vehicle virtual prototype model, realize the joint simulation of MATLAB / Simulink and RecurDyn, and run it on the RT-LAB real-time simulation platform , realize the joint simulation of the dynamic characteristics of the electric drive system and the transient dynamics of the tracked vehicle, so as to improve the dynamic performance of the vehicle, and provide a theoretical basis for improving the electric drive system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More