

Three-movement one-rotation four-freedom double-movable-platform parallel mechanism
A double-action platform, degree of freedom technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of unfavorable mechanism efficiency and dynamic performance, high requirements for the use environment, service life restrictions, etc., to improve the rotation angle. Scope, compact and superior mechanism structure, and the effect of improved bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to further understand content and characteristics of the present invention, in conjunction with accompanying drawing and preferred embodiment, the present invention is described in detail as follows:
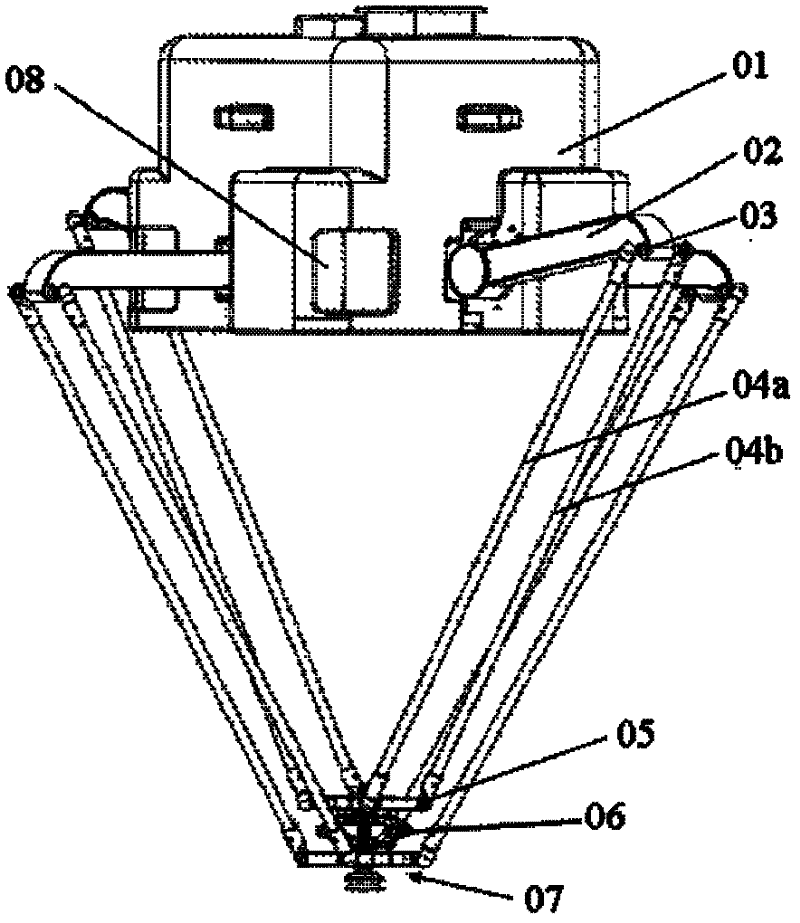
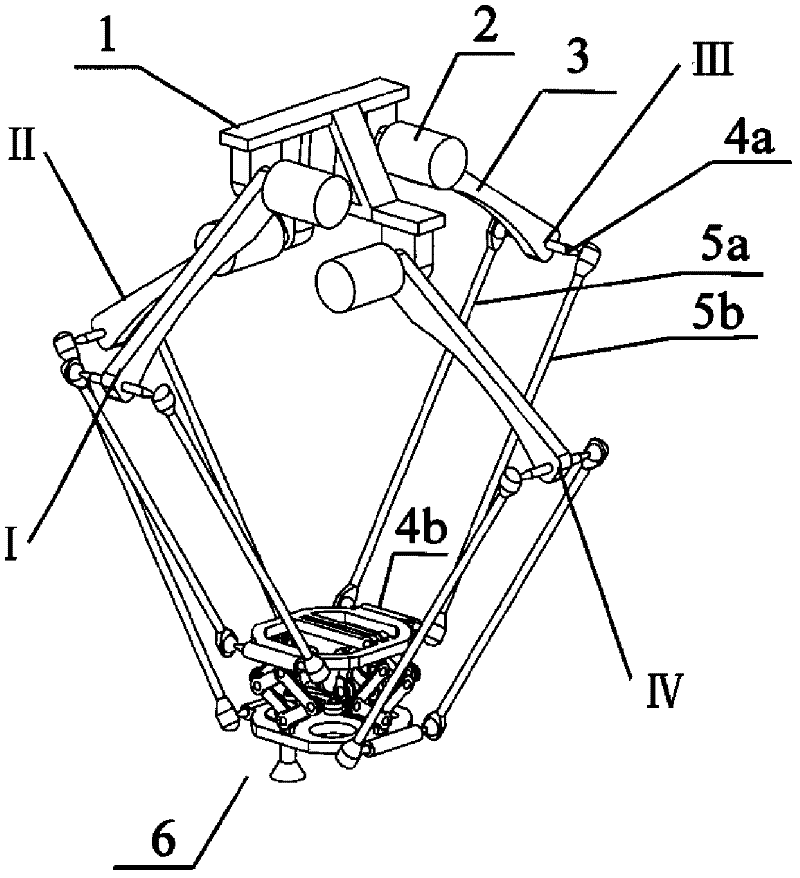
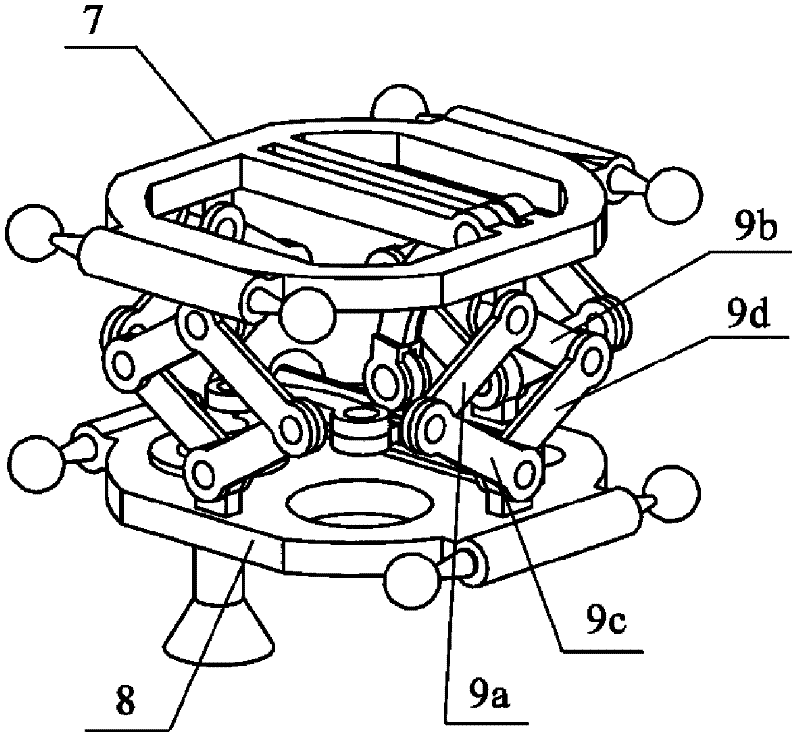
[0019] The present invention proposes a preferred embodiment of a three-rotation-one-movement four-degree-of-freedom double-motion platform parallel mechanism, as figure 2 As shown, it includes a fixed platform 1, a moving platform 6 and the first branch chain I, the second branch chain II, the third branch chain III, and the fourth branch chain IV connecting the fixed platform 1 and the moving platform 6; The branch chains have the same structure, and are evenly distributed in turn and connect the outer circumference of the fixed platform 1 and the moving platform 6; The long connecting rod 5a, the follower long link 5b and a plurality of kinematic pair hinges, wherein the active link 3 is connected with the fixed platform 1 through a rotating pair, and this ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More