

Error suppressing method of rotary strap-down inertial navigation system based on space stabilization
A strapdown inertial navigation and system error technology, applied in the field of measurement, can solve the problems of fiber optic gyroscope development limitations, the accuracy of fiber optic gyroscope can not meet the long endurance, high precision and other problems, to achieve the effect of improving the accuracy of navigation and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
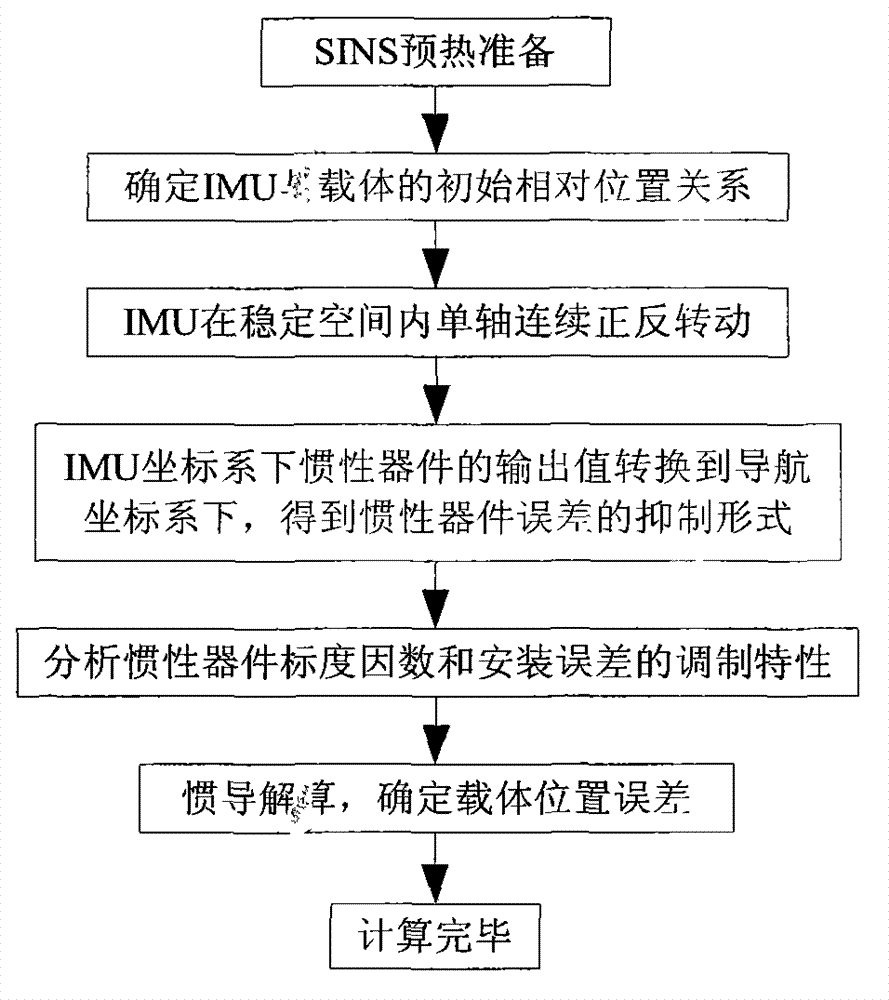
[0067] The specific embodiment of the present invention is described in detail below in conjunction with accompanying drawing:
[0068] (1) Determine the initial position parameters of the carrier by GPS, and bind them into the navigation computer;
[0069] (2) The strapdown inertial navigation system is preheated, and the data output by the fiber optic gyroscope and the quartz accelerometer are collected and processed;
[0070] (3) After the IMU rotates, the data generated by the fiber optic gyroscope and the quartz accelerometer are converted into the navigation coordinate system, and the modulation form of the constant value deviation of the inertial device is obtained;
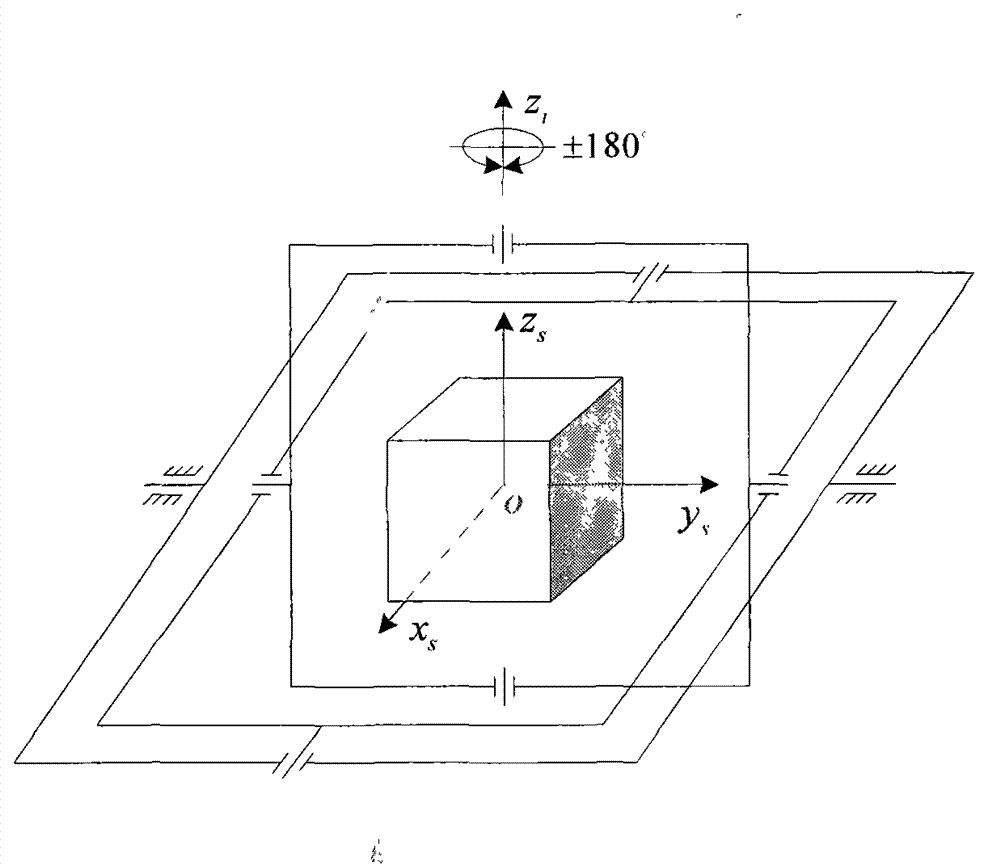
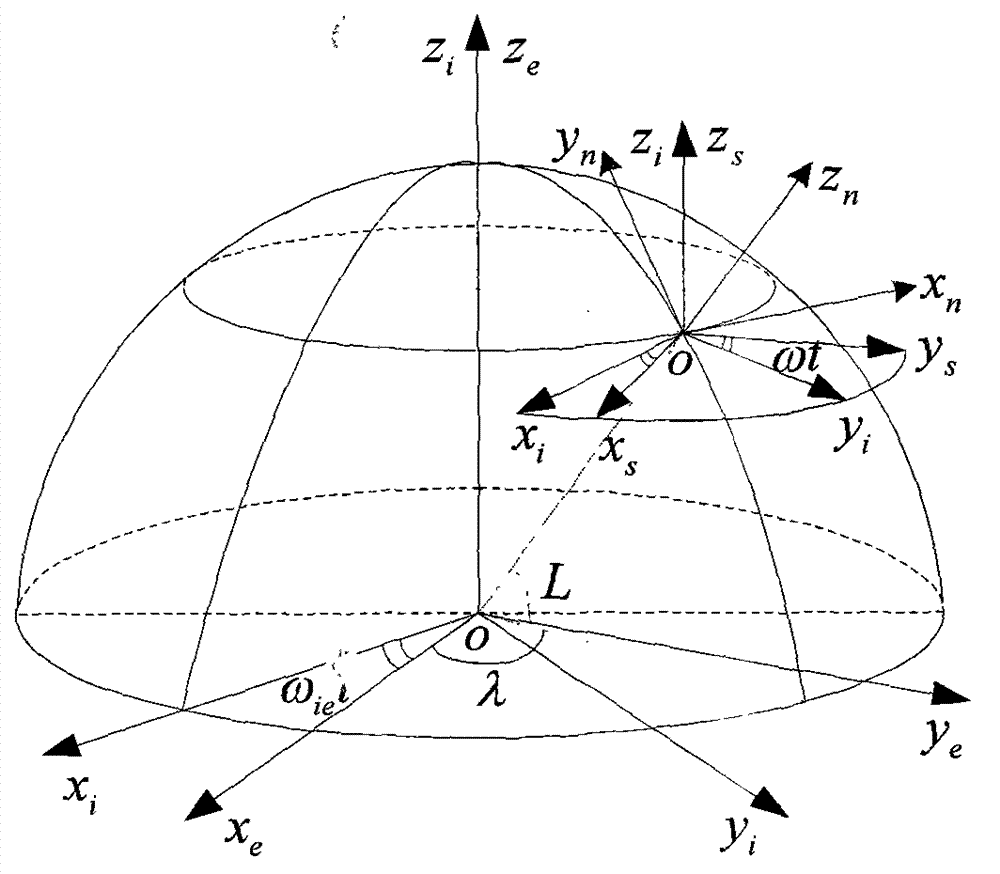
[0071] ox of the inertial measurement unit coordinate system s the y s plane parallel to the Earth's equatorial plane, oz s axis parallel to the earth's rotation axis, and pointing in the same direction as the earth's rotation angular velocity (see attached image 3 ), determine the conversion relations...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More