

Frog-inspired biomimetic jumping robot
A robot and frog technology, applied in the field of robotics, can solve the problems of low ratio of energy consumption to total energy consumption, complex mechanical structure and control, and low bouncing efficiency of bionic robots, so as to optimize the mechanical structure of the legs and enhance the posture. The effect of stability and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
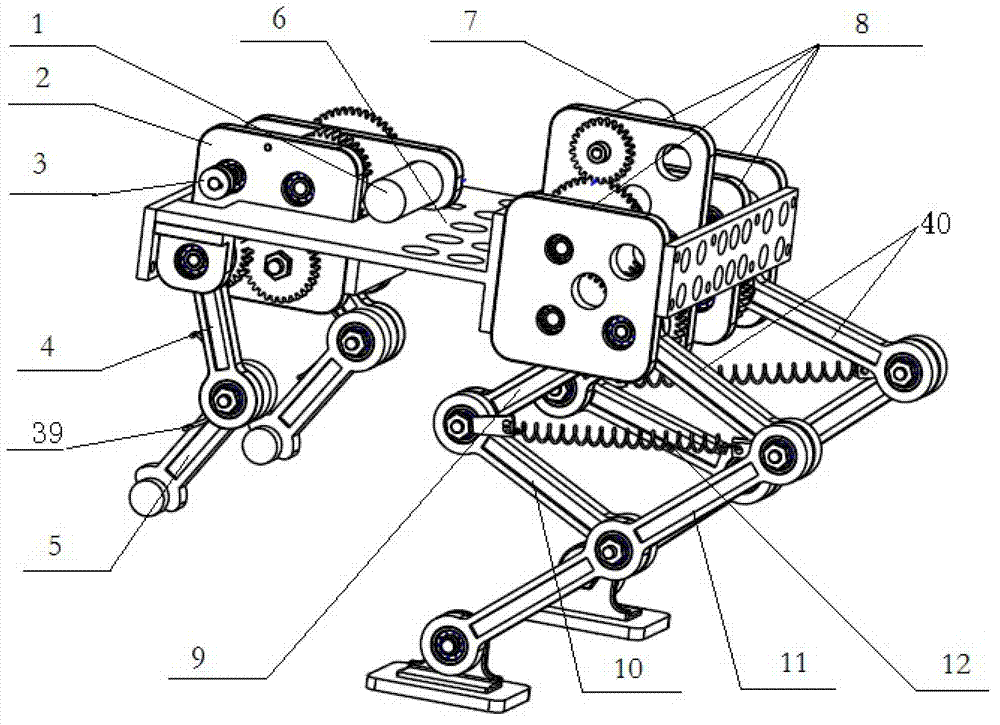
[0056] Such as figure 1 As shown, it is generally divided into hind limb drive mechanism, hind limb actuator, trunk, forelimb drive mechanism and forelimb actuator.
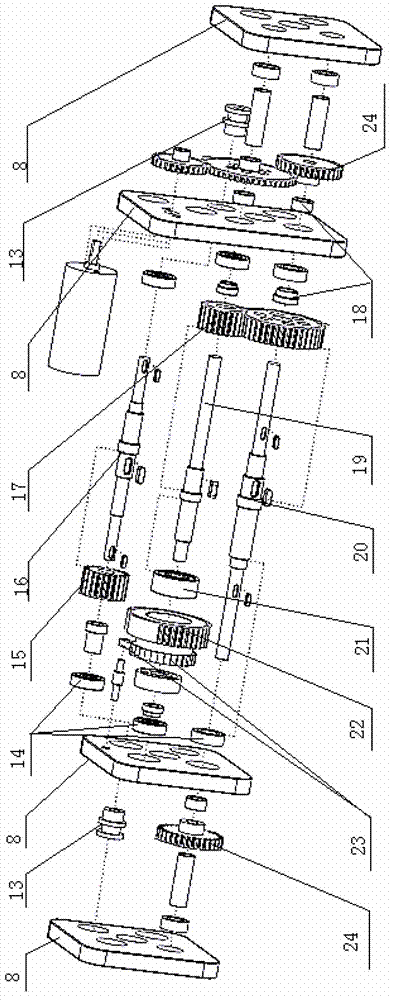
[0057] Such as figure 2 As shown, the hindlimb drive mechanism:
[0058] Comprising a hindlimb driving motor 7 installed on the mounting plate 8, gears are installed at the output end of the hindlimb driving motor 7, and the torque is given to the input shaft 19 through the gear-to-gear transmission torque, and the second gear 17, one-way bearing 21, and the second gear 17 are installed on the input shaft 19. The complete gear 22 and the ratchet pawl 23, the second gear 17 transmits torque to the second output shaft 20 through the gear-gear transmission structure, the ratchet pawl 23, the incomplete gear 22 and the one-way bearing 21 form a working whole, through the incomplete The gear-gear mechanism transmits torque to the first output shaft 16; the input shaft 19, the first output shaft 16 and the second ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More