Automatic speed searching device and method for partial stroke test of control valve
A technology for controlling valves and speeds, applied in the direction of valve operation/release devices, valve devices, fluid pressure actuating devices, etc., which can solve the problems of no control valves, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] While the following text sets forth a detailed description of exemplary embodiments of the invention, it should be understood that the legal scope of the invention is defined by the words of the claims at the end of this patent. The detailed description is exemplary only and does not describe every possible embodiment, since describing every possible embodiment would be impractical, if not impossible. Based on reading this disclosure, one of ordinary skill in the art will be able to implement one or more alternative embodiments, using either current technology or technology developed after the filing date of this patent. Such additional modifications still fall within the scope of the claims defining the invention.
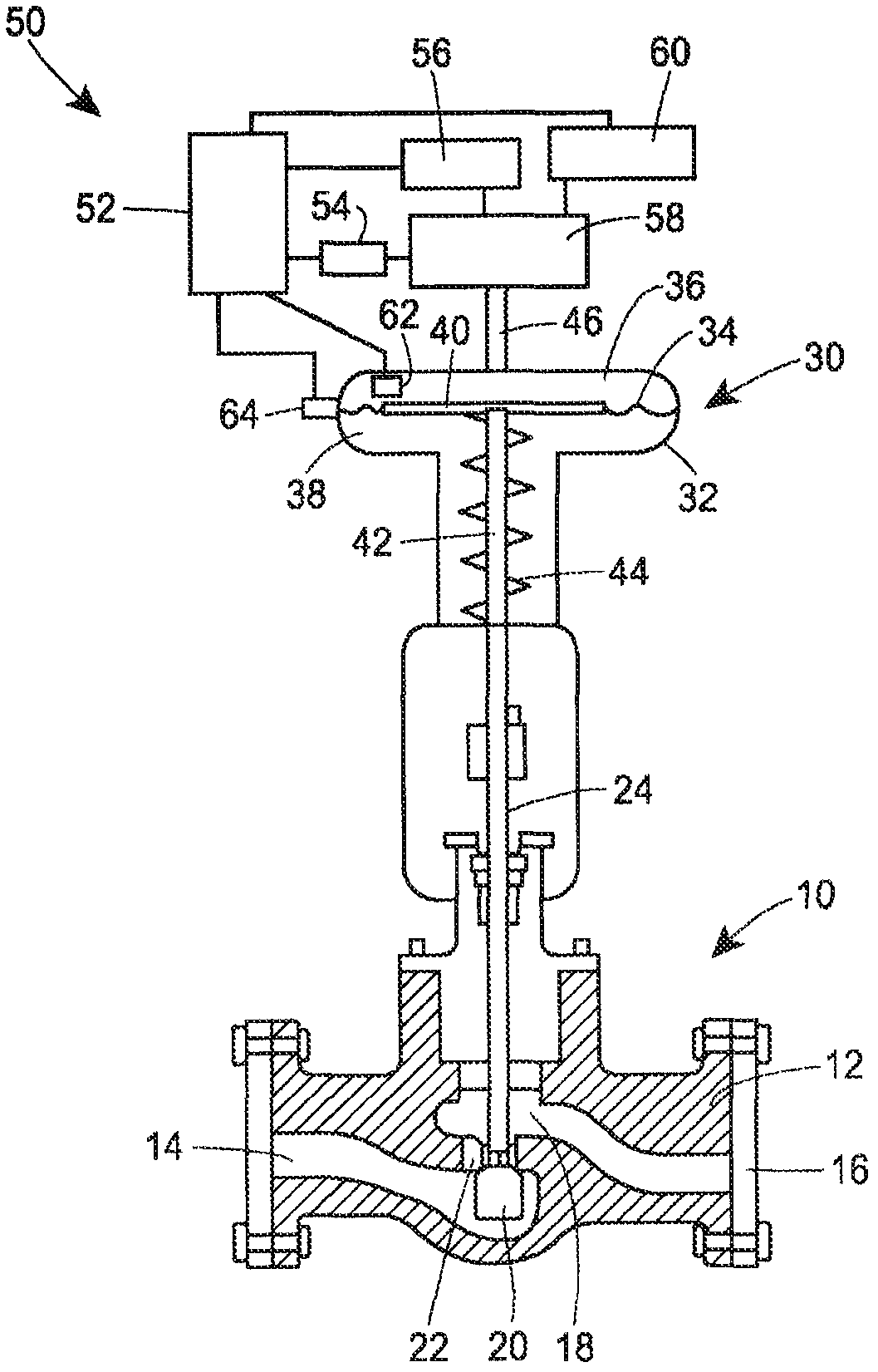
[0020] Control devices for a process control system may include process control devices, such as control valves, dampers, or other variable opening devices, for modulating or controlling fluid flow within the process control system. While the exemplary emb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More