Multi-moving-mode bionic moving robot
A mobile robot and multi-motion mode technology, applied in the field of robotics, can solve the problems of terrain adaptability and obstacle surmounting ability limitations, robot control system complexity, flexible mobility performance limitations, etc., to achieve strong terrain adaptability and road passing ability, Good for climbing and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Describe the present invention in detail below in conjunction with embodiment and accompanying drawing. The embodiment is a specific implementation description carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes. However, the protection scope of the claims in the application of the present invention is not limited to the description scope of the embodiments.
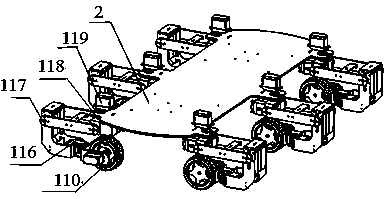
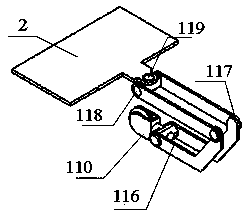
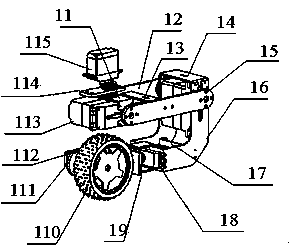
[0019] The multi-motion mode bionic mobile robot designed by the present invention (hereinafter referred to as the robot, see Figure 1-7 ), the link mechanism is mainly used as the transmission mechanism, and the joint rotation angle is driven by a motor plus a bracket. The specific institutional characteristics are:
[0020] The robot of the present invention can be divided into three components from the perspective of the overall motion relationship, namely, the robot body mechanical structure responsible for the robot body ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More