

Method for cooperative search and dynamic task allocation of unmanned aerial vehicle teams under uncertain environment
An unmanned aerial vehicle and dynamic task technology, applied in the field of flight formation guidance and control, can solve problems such as increasing the number of unmanned aerial vehicles to be discovered, and achieve the effect of shortening computing time, reducing computing load, and ensuring real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
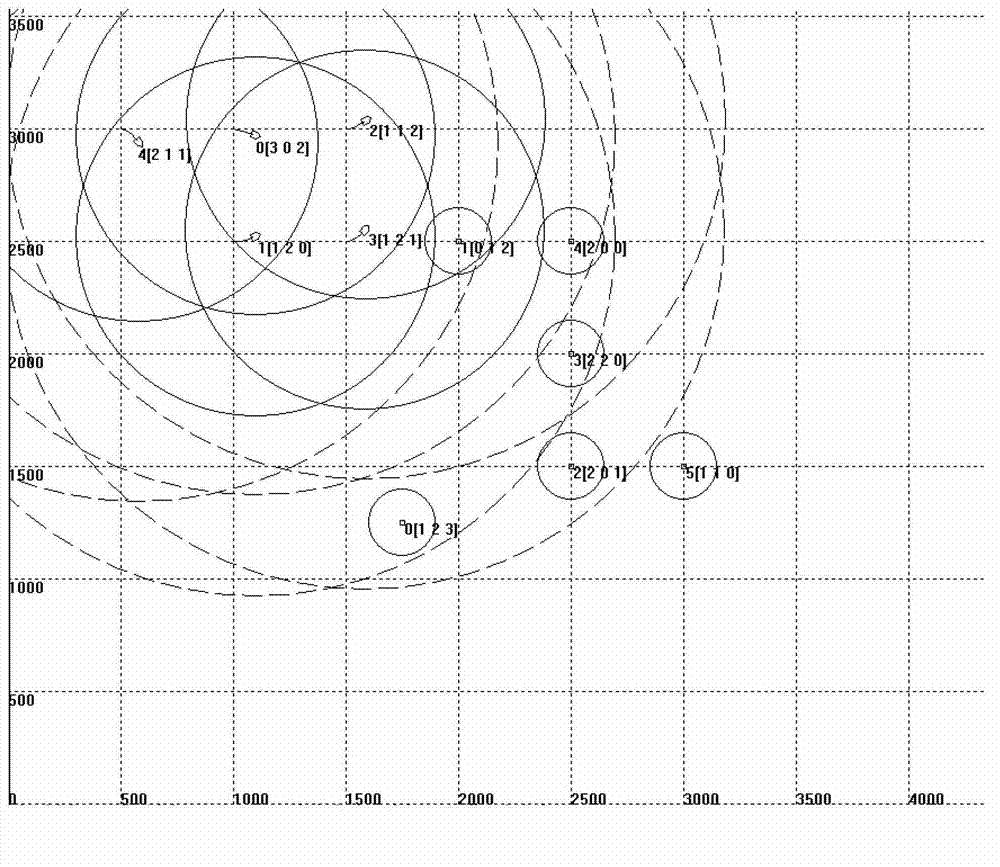
[0096] The initial state of 5 drones performing 6 tasks is as follows: Figure 5 As shown, among them, the detection radius of each UAV is 800 meters, and the communication radius is 1600 meters. For clarity, it is not marked in the figure. When the UAV is in the search mode, the guidance law guides the UAV to make the center of the circle at ( 2100, 2025), a circular motion with a radius of 800 meters, which is a typical situation where the number of drones performing missions is smaller than the number of missions. The initial information of the 5 drones is shown in the table below:
[0097]
[0098] The initial information of the 6 mission points is shown in the table below:
[0099]
[0100]
[0101] When the existing method is used for UAV task assignment, the UAV only selects the task with the largest advantage function within its own detection range, and there is no information interaction between UAVs. 5 UAVs perform 6 tasks. Trajectory such as Figure 6 Sh...
Embodiment 2
[0104] When adopting the method of the present invention to carry out 8 unmanned aerial vehicles to carry out 10 tasks, the initial state is as follows Figure 8 As shown, the detection radius of each UAV is 800 meters, and the communication radius is 1600 meters. For clarity, it is not marked in the figure. When the UAV is in the search mode, the guidance law guides the UAV to make the center of the circle at (2100, 2025), a circular motion with a radius of 800 meters. Among them, the initial information of 8 UAVs is shown in the following table:
[0105]
[0106]
[0107] The initial information of the 10 mission points is shown in the table below:
[0108]
[0109] When using the existing method for UAV task assignment, the UAV only selects the task with the largest advantage function within its own detection range, and there is no information interaction between UAVs. When 8 UAVs perform 10 target tasks, each has no Human-machine trajectory such as Figure 9 Sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More