

Gait rehabilitation training robot
A rehabilitation robot and gait training technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of mechanism design, modular design computer control is immature, not many and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
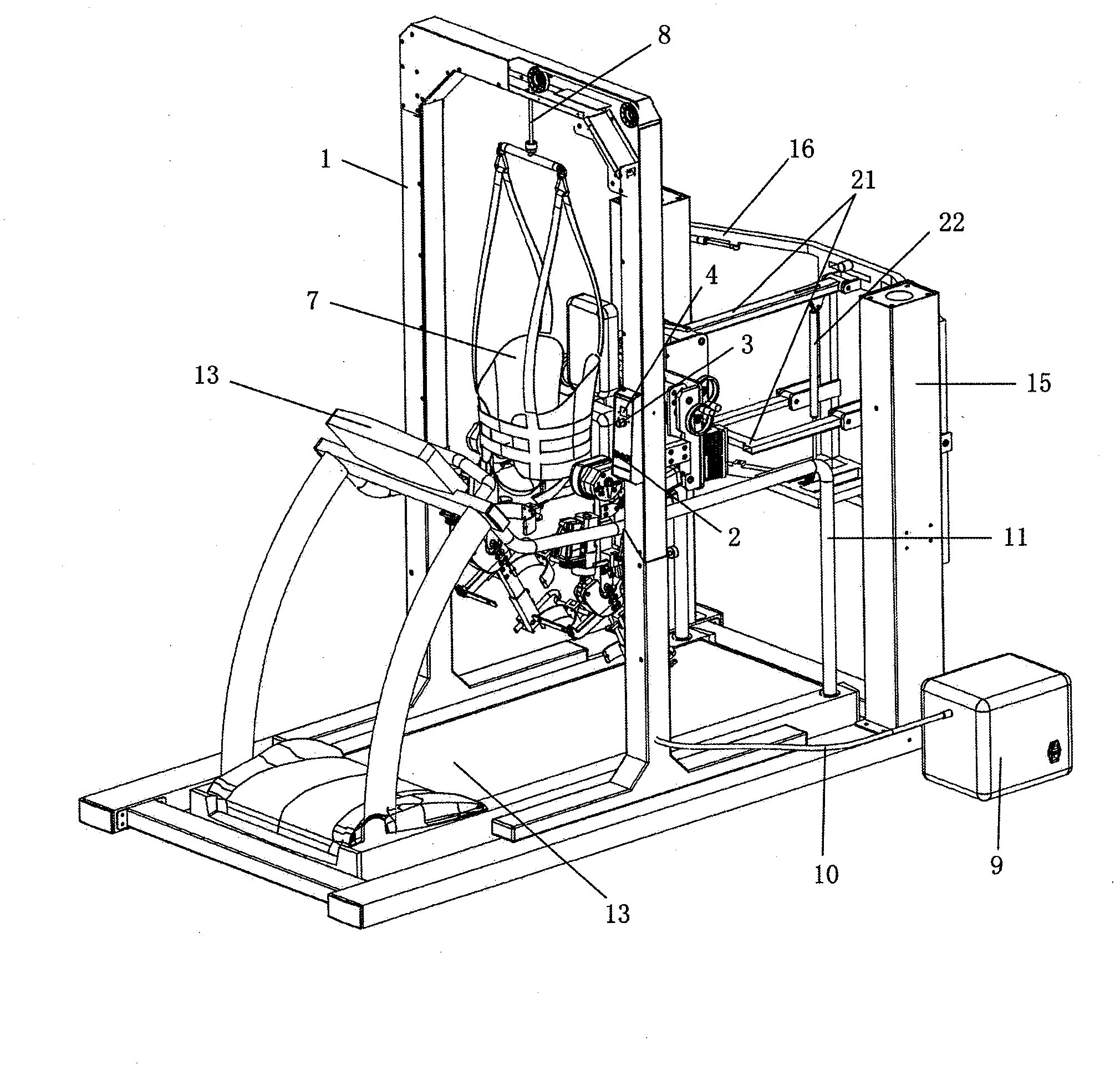
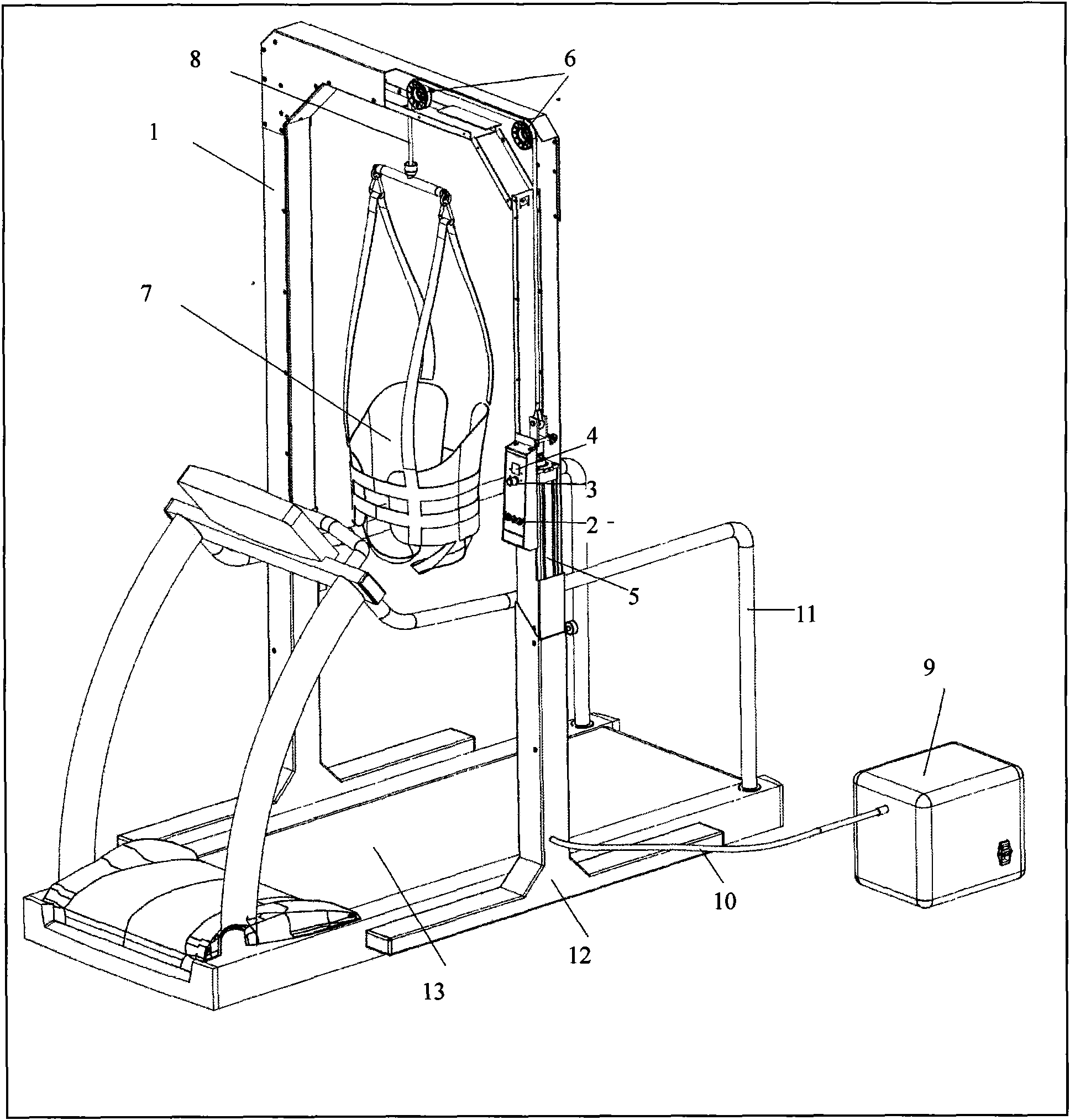
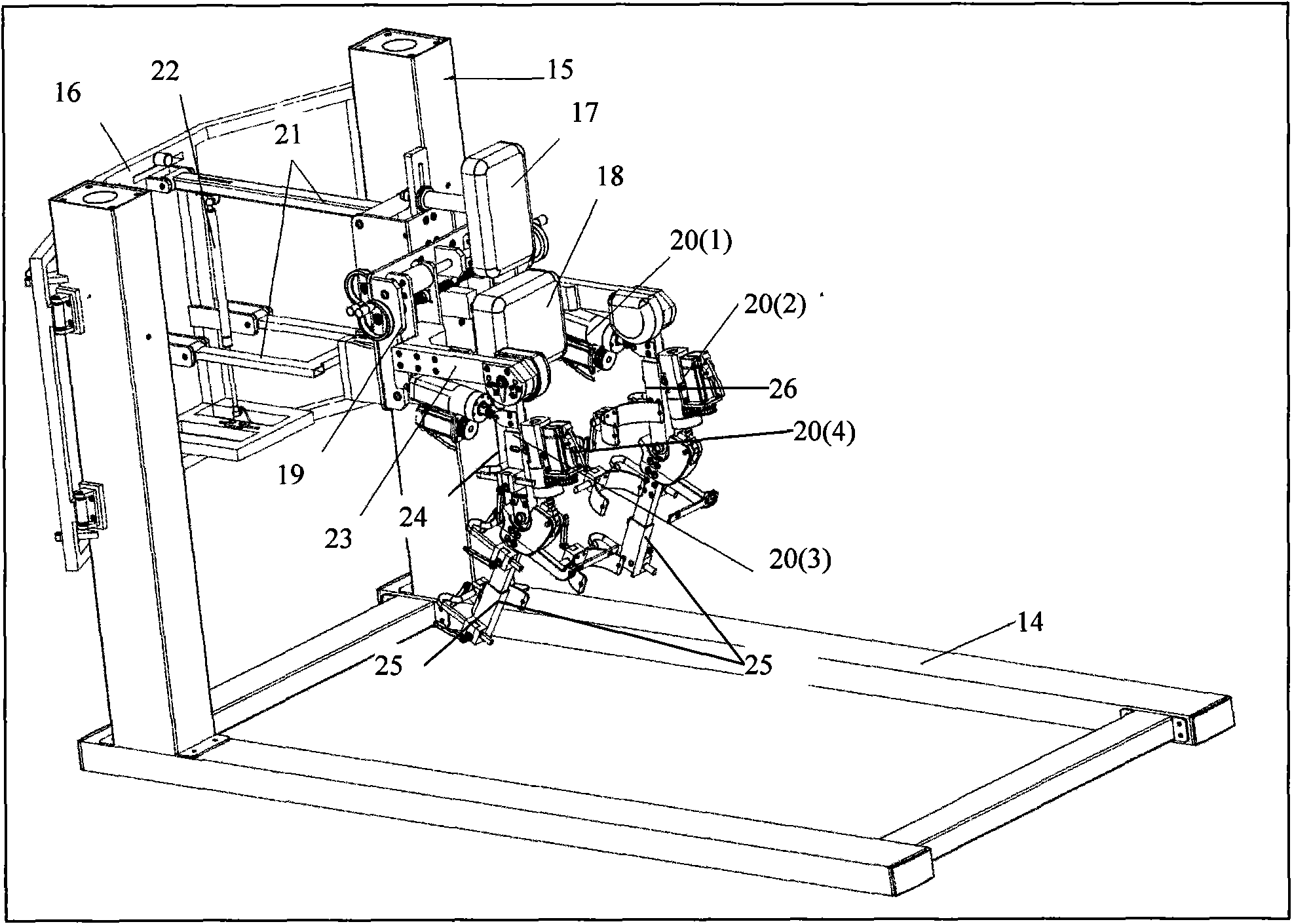
[0008] In order to achieve the above objective, the present invention adopts the following technical solutions. The lower limb rehabilitation training robot with biofeedback and intelligent step adjustment of the present invention includes a pneumatic weight reduction system, a lower limb training device and a microcomputer control system.
[0009] Pneumatic weight reduction system: including frame (1), air pressure switch (2), air pressure regulating valve (3), air pressure gauge (4), air cylinder (5), pulley block (6), strap (7), cable (8) ), compressor (9), PVC hose (10), handrail (11), fixed bracket (12), treadmill (13).
[0010] The air cylinder (5) is installed and fixed in one side of the frame. The telescopic end of the air cylinder (5) is connected to the cable (8), and the cable (8) is transferred to the top hole of the frame (1) through the pulley block (6) Then connect the straps (7); the armrests (11) are installed on the treadmill (13), the frame (1) is fixed on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More