Mechanical arm motion control system and mechanical arm motion control method
A motion control system and robotic arm technology, applied in the field of robotics, can solve problems such as reduced observation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
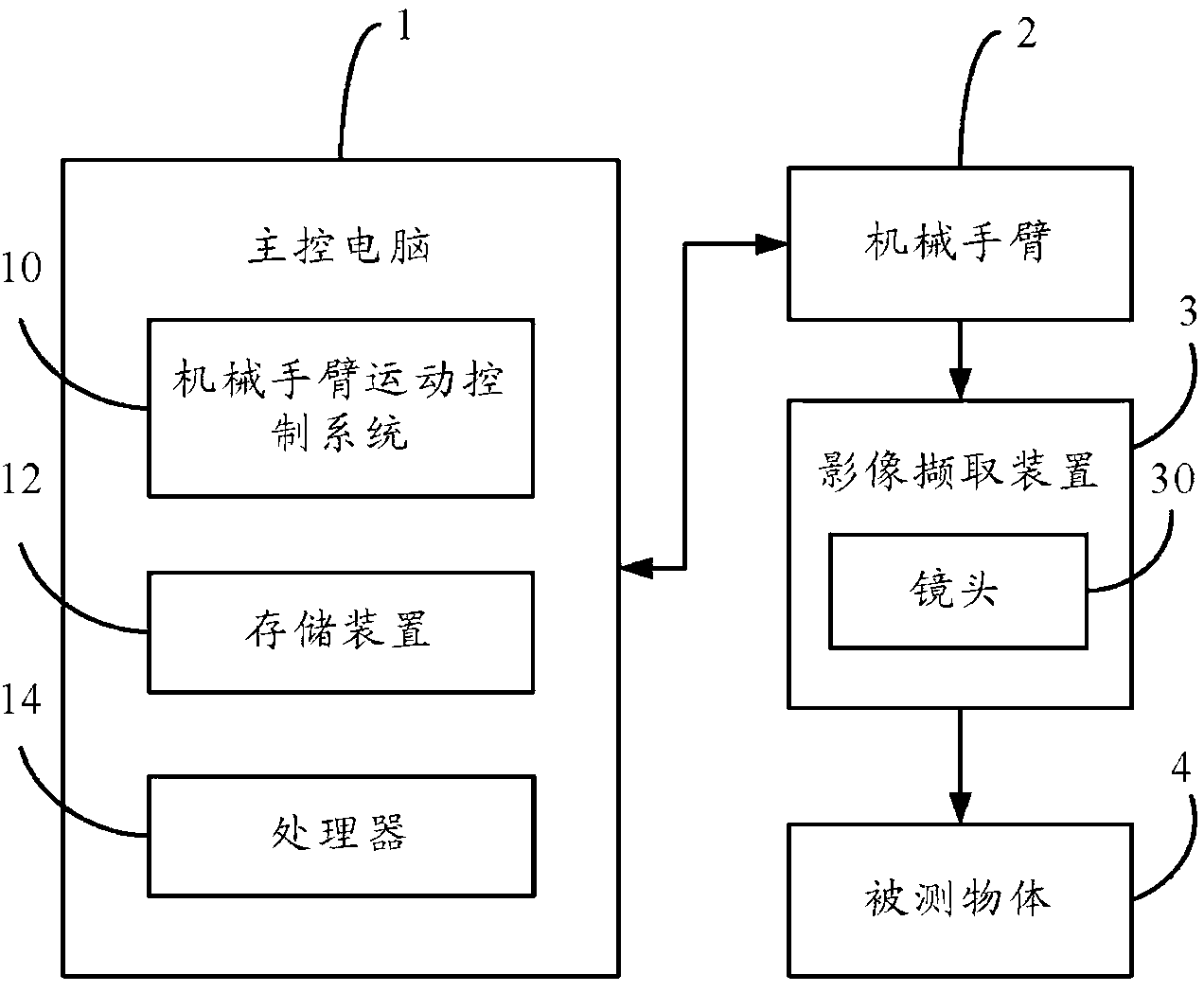
[0018] like figure 1 As shown, it is an application environment diagram of a preferred embodiment of the robot arm motion control system of the present invention. The robot arm motion control system 10 runs in a computing device such as a main control computer 1 , and the main control computer 1 also includes a storage device 12 and at least one processor 14 . The robotic arm motion control system 10 is installed in the storage device 12 in the form of software programs or instructions, and the execution of the robotic arm motion control system 10 is controlled by the at least one processor 14 .
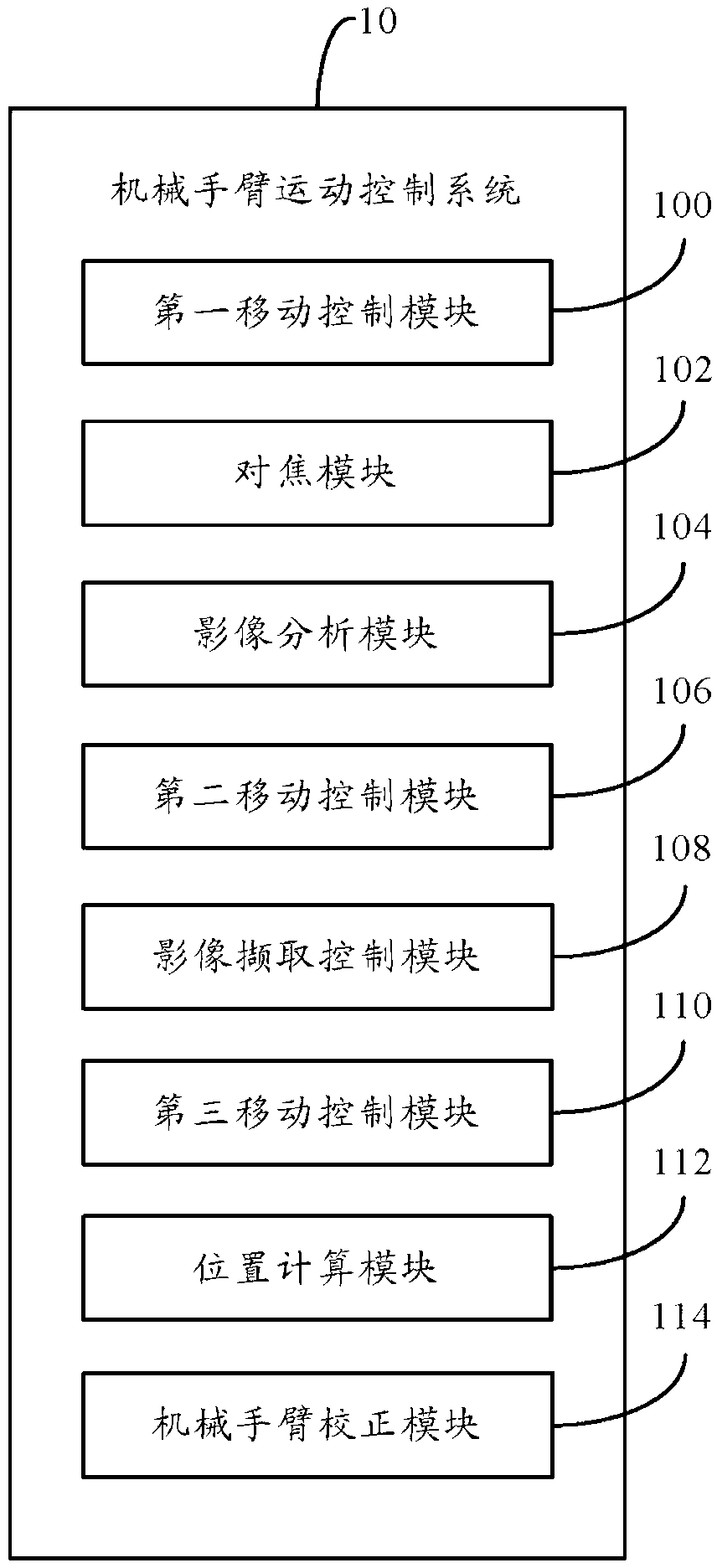
[0019] like figure 2 As shown, the robotic arm motion control system 10 includes a first movement control module 100, a focusing module 102, an image analysis module 104, a second movement control module 106, an image capture control module 108, a third movement control module 110, a position Calculation module 112 and robot arm correction module 114. The functions of modules 100...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com