Mapping method and system for supporting direct registration of sensor
A mapping method and sensor technology, applied in the field of geographic information services, can solve problems such as information loss, increased query time, and inability to meet user needs, and achieve the effects of synchronous update and operation, guaranteed accuracy, and perfect sensor information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
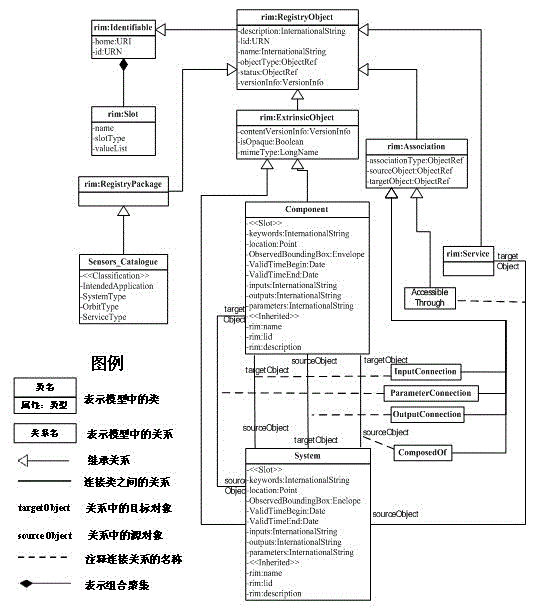
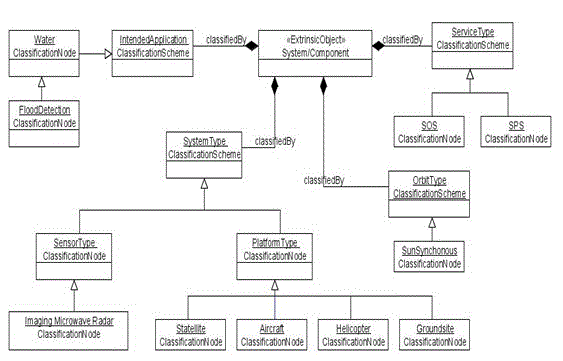
[0052] Directory services can be effectively applied to geospatial information resources, such as the retrieval and management of sensor metadata, which can be bound to specific applications and their metadata information models to form content and functions that meet their own needs, and provide external query services. The invention constructs a registration information model capable of storing sensor information, designs a mapping relationship between the sensor information model and the registration information model, and supports direct registration of sensors.
[0053] The present invention will be further described below with specific embodiment in conjunction with accompanying drawing:
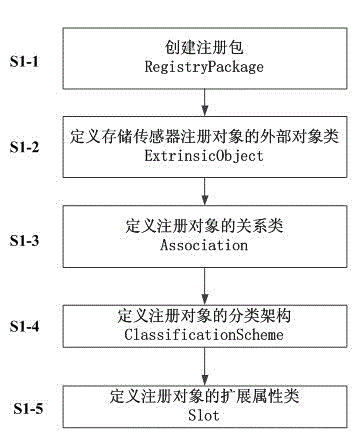
[0054] A mapping method supporting direct sensor registration provided by an embodiment includes building a sensor registration information model, and building a mapping relationship from the sensor information model to the registration information model.
[0055] Constructing the sens...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com