

Algorithm of walking along edge of dust collection robot
A robot and algorithm technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of low work efficiency, unswept walls, and no learning process for vacuuming robots, etc., and achieve the effect of easy implementation and simple control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Now in conjunction with accompanying drawing, the present invention will be further described:
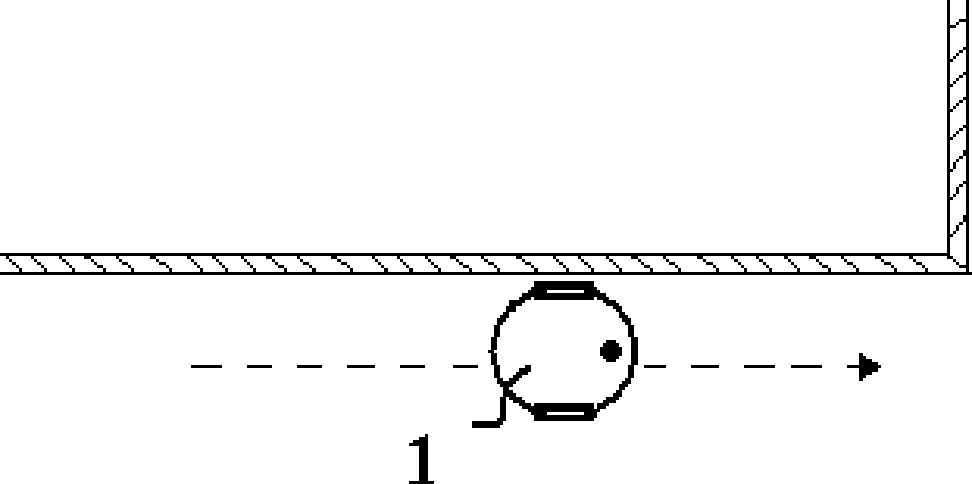
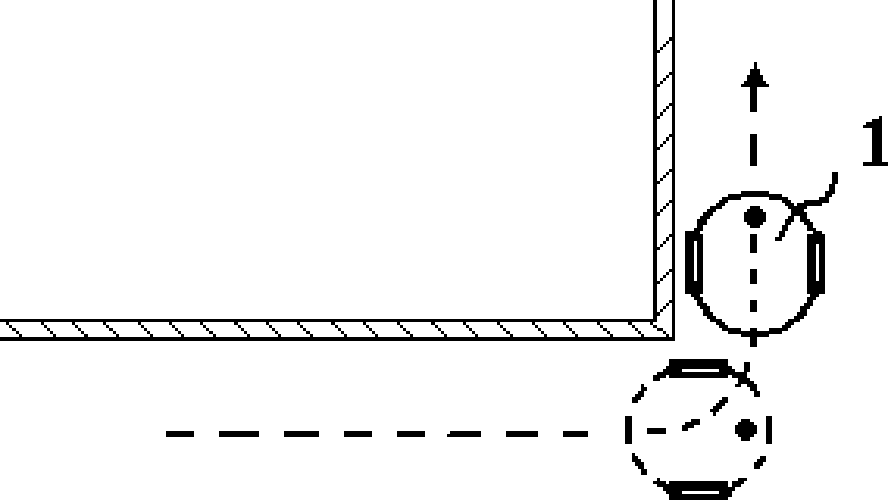
[0023] refer to Figure 1-5 , a welt-walking algorithm for vacuuming robots.
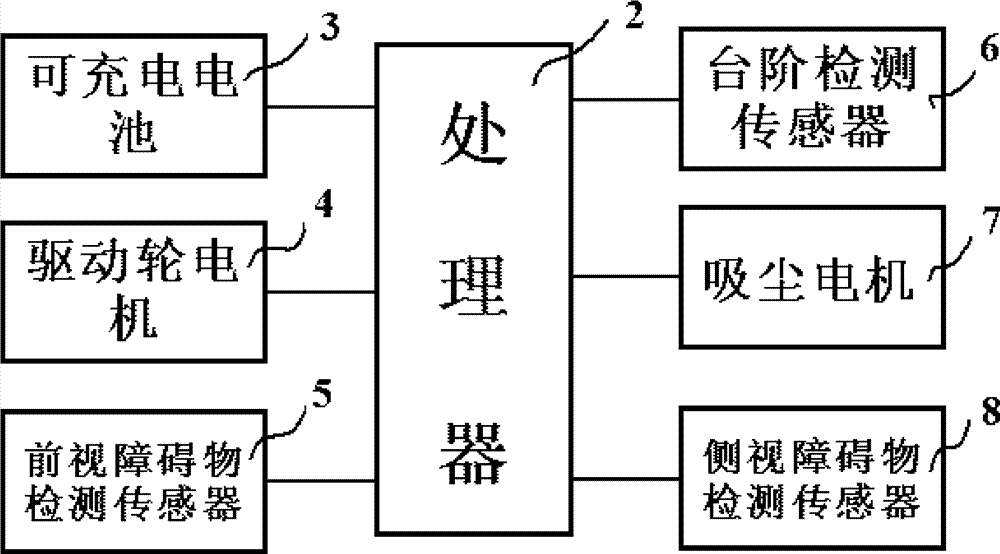
[0024] The dust cleaning robot 1 includes a vehicle frame on which two driving wheels and two driving wheel motors 4 and a support wheel are connected to the driving wheels. The forward-looking obstacle detection sensor 5 installed in the front is used to detect the obstacle situation ahead; the side-viewed obstacle detection sensor 8 installed on the left side is used to measure the distance between the vacuum cleaning robot 1 and the side obstacles The step detection sensor 6 installed at the bottom of the vehicle frame is used to measure whether there is a step in front of the vacuum cleaning robot 1 ; The step detection sensor 6 is provided with an infrared emitting device and an infrared receiving device, and the direction of the infrared emitting device and the infrared receiving device is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More