

Quaternion ship security domain model and ship collision avoidance method
A domain model and technology in the ship field, applied in the field of ship collision avoidance, can solve problems such as ambiguous physical meaning, inconvenient understanding and practical application, and difficult to apply
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
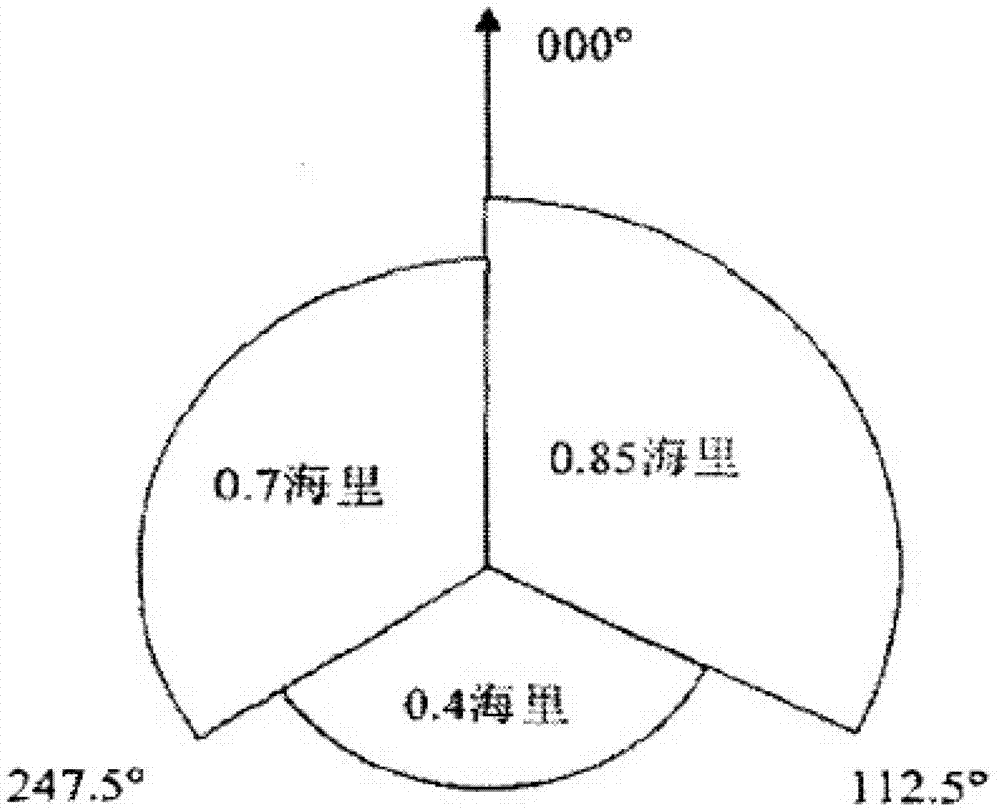
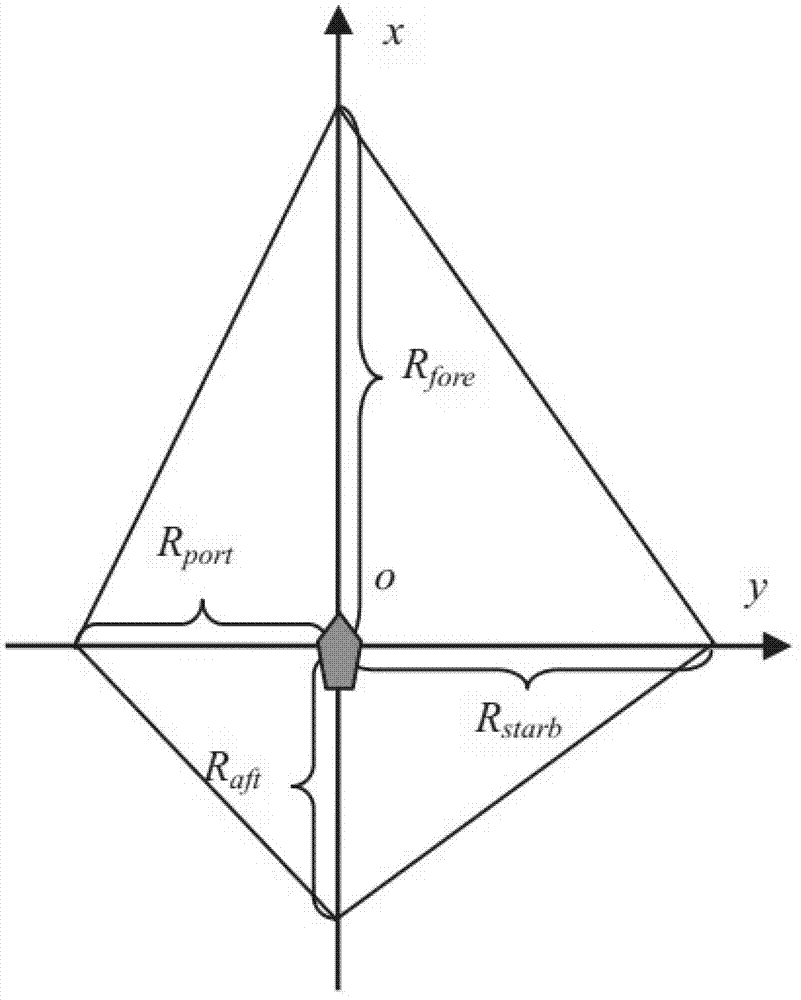
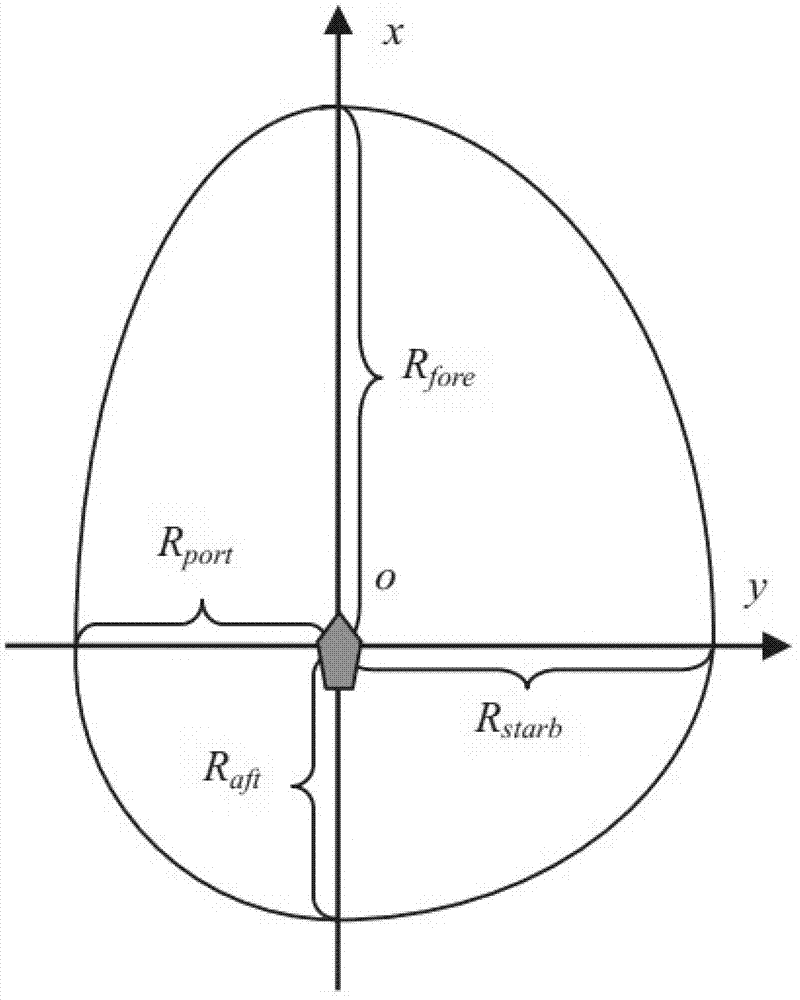
[0064] Depend on Figure 1-Figure 5 Shown: A new type of ship domain security model—a quaternary ship domain model, the model is determined by four directional radii, and the directional radii are: R fore , R aft , R starb and R port . R fore , R aft are the longitudinal radii of the quaternary ship domain (R lon ) front and rear radius; R port , R starb are the transverse radii of the quaternary ship domain (R lat ) of the left and right radii. Then the quaternary ship domain model is composed of closed curves including the radii of these four directions, and its expression is as follows:
[0065] QSD={(x,y)|f(x,y;Q)≤1, Q={R fore , R aft , R starb ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More