

Flexible micro-positioning platform
A micro-positioning platform and flexible technology, applied in the field of machinery, can solve the problems of accumulated error, weak structure, small volume, etc., and achieve the effect of enlarging the scope of the working space, increasing the scope of the working space, and fast dynamic response speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solution of the present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings.
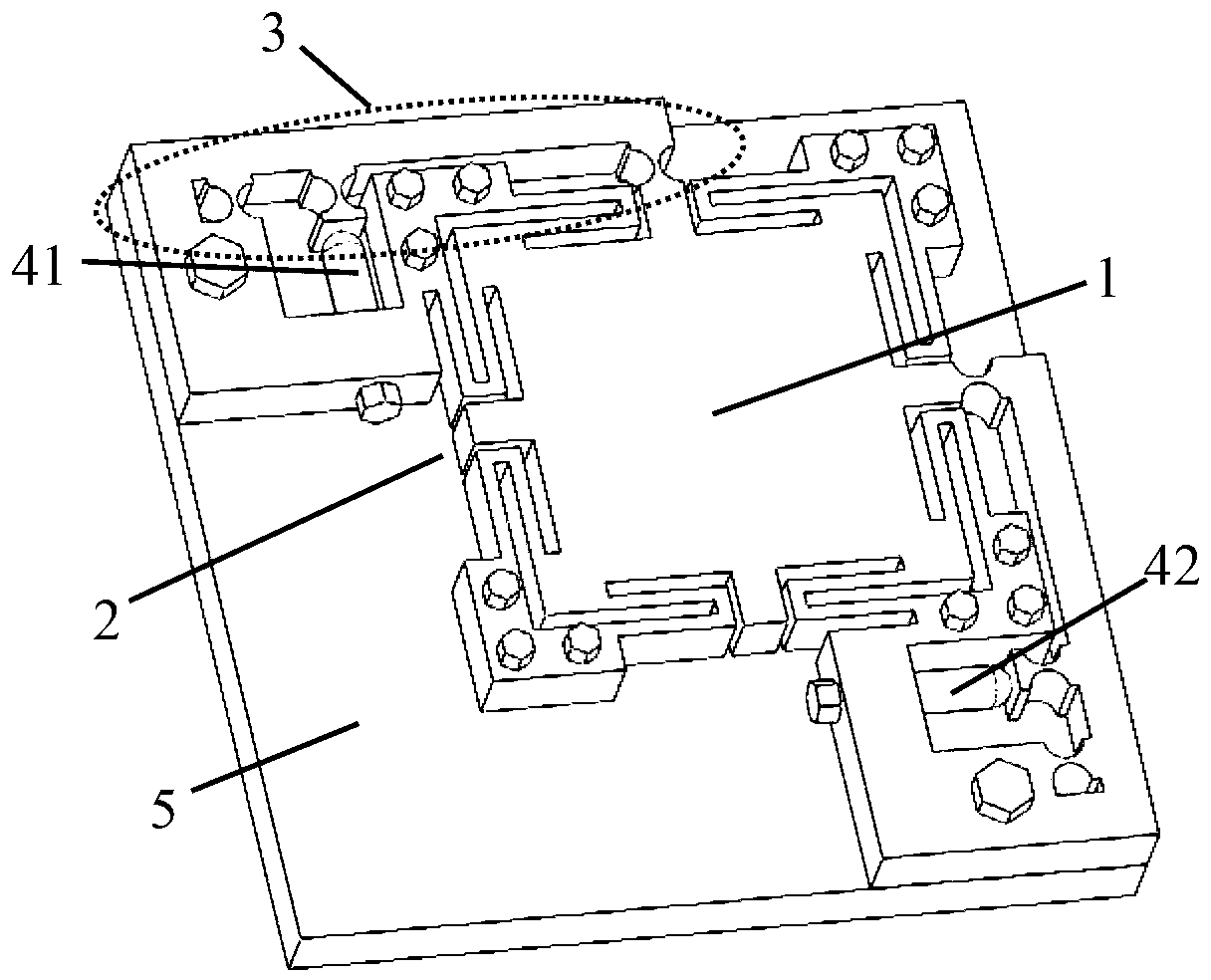
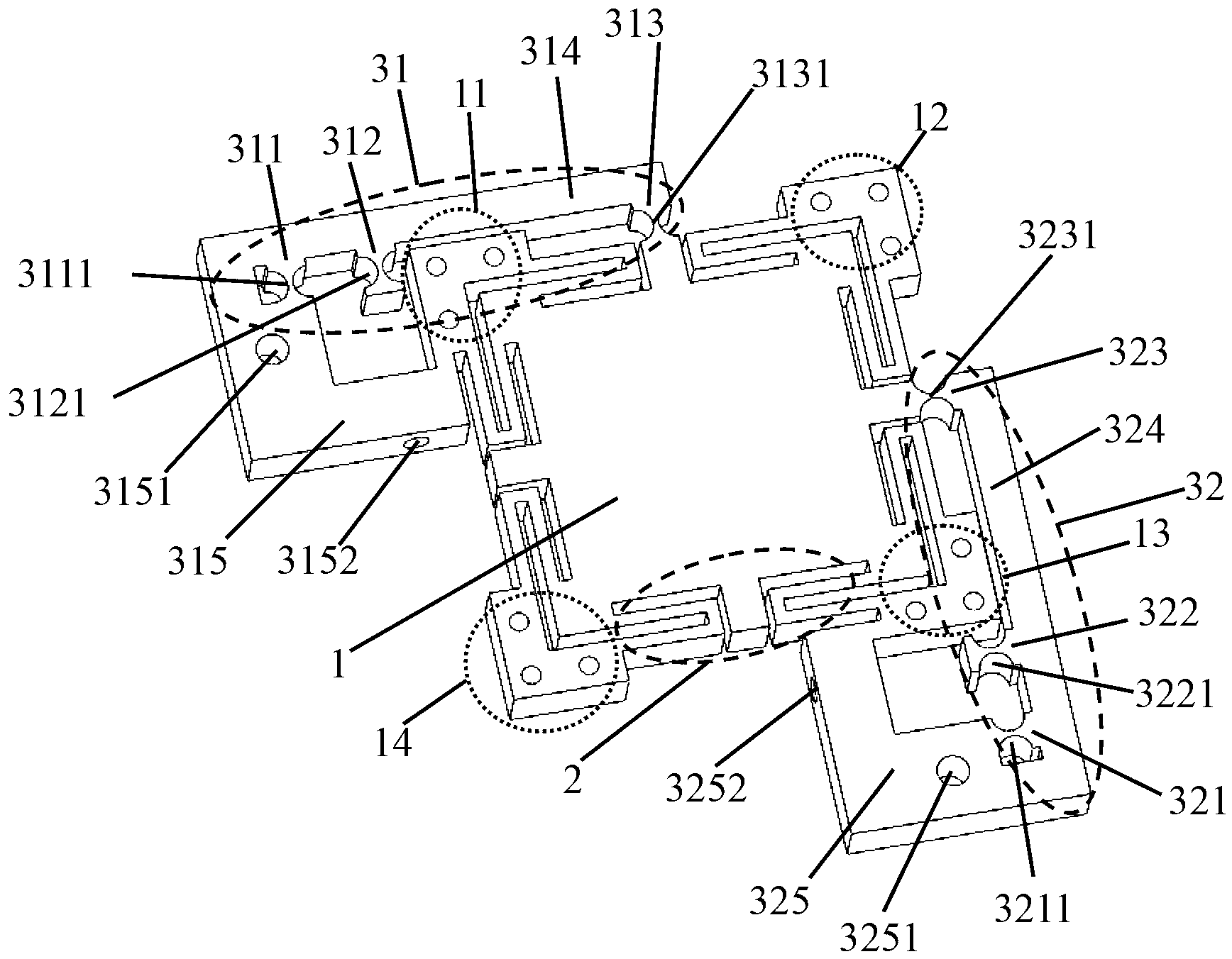
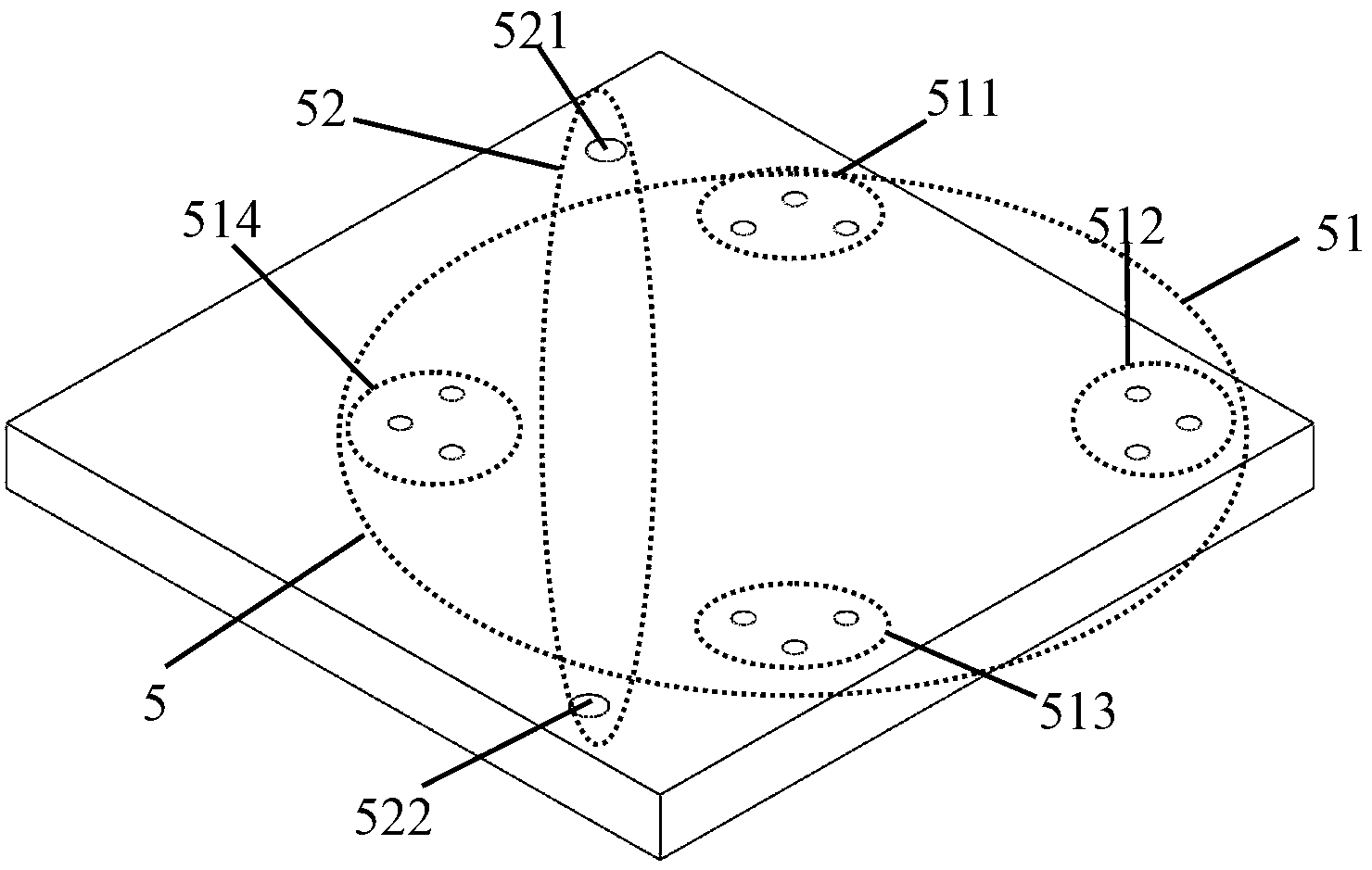
[0021] The flexible micro-positioning platform based on lever displacement amplification designed by the present invention (referred to as the positioning platform, see Figure 1-4 ), which is characterized in that the positioning platform includes a moving platform, four pairs of bow-shaped leaf springs, two flexible lever displacement amplification mechanisms, two piezoelectric ceramic drivers and a base, the moving platform is a square structure, and is distributed on it Supported by four pairs of bow-shaped leaf springs on the four edges, a protrusion is extended outward from the midline position of the four sides of the moving platform, and among the four protrusions, the lower edge of the moving platform and the moving platform The two protrusions on the left edge of the moving platform are vacant, and the two p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More