

Two-freedom-degree parallel-connection rotation mechanism with spherical surface pure-rolling property
A technology of rotating mechanism and degree of freedom, applied in the direction of non-electric variable control, instrument, position/direction control, etc., can solve the problems of difficult popularization and application, few new configurations, unfavorable motion space planning and design, etc., to achieve easy manufacturing, strong The effect of bearing capacity and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
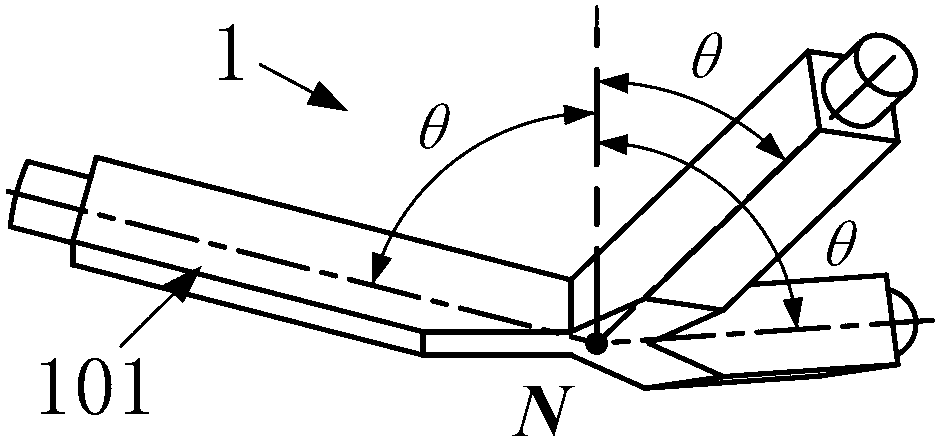
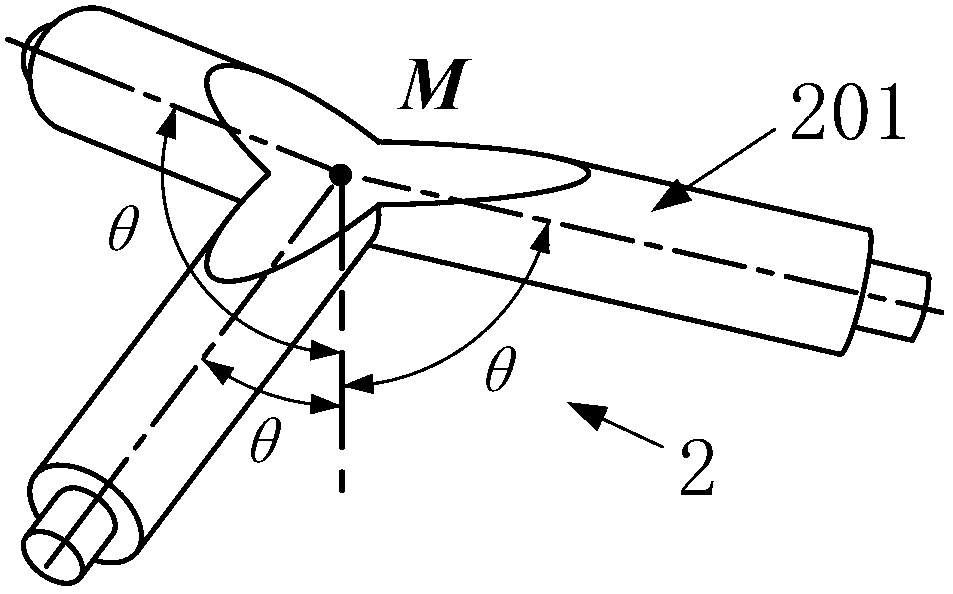
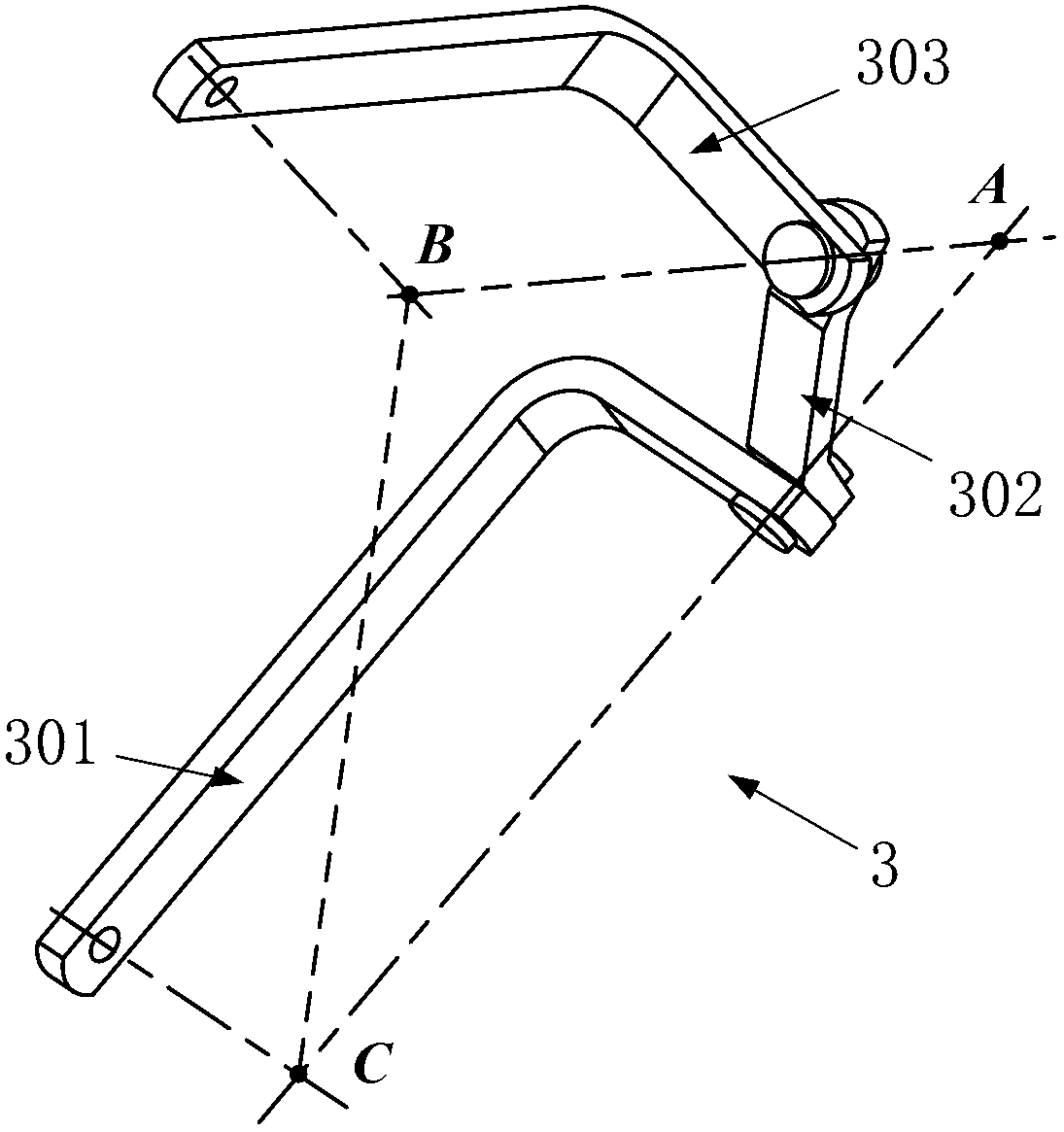
[0062] Such as Figure 5 As shown, the two-degree-of-freedom parallel rotation mechanism includes a fixed base 1, a moving platform 2, and a configuration A kinematic branch chain 3; both the fixed base 1 and the moving platform 2 have three symmetrically distributed rotating pair connection axes; The positioning surface in 1 is set opposite to the installation surface in motion platform 2; the rotating pair connection hole of the upper link 303 in each configuration A motion branch chain 3 is connected with the rotating pair connecting shaft on the moving platform 2 to form a rotating pair; The rotating pair connecting hole of the connecting rod 301 is connected with the rotating pair connecting shaft on the fixed base 1 to form a rotating pair.
Embodiment 2
[0064] Such as Image 6 As shown, it includes a fixed base 1, a moving platform 2, and three configuration A kinematic branch chains 3; both the fixed base 1 and the moving platform 2 contain three symmetrically distributed rotating pair connection ends; the positioning surface of the fixed base 1 Set opposite to the installation surface in the motion platform 2; the rotation pair connection hole of the upper link 303 in each configuration A motion branch chain 3 is connected with the rotation pair connection shaft on the motion platform 2 to form a rotation pair; the lower link 301 The rotating pair connecting hole is connected with the rotating pair connecting shaft on the fixed base 1 to form a rotating pair.
Embodiment 3
[0066] Such as Figure 7 As shown, it includes a fixed base 1, a moving platform 2, and three configuration B kinematic branch chains 3; both the fixed base 1 and the moving platform 2 contain three symmetrically distributed rotating pair connection ends; the positioning surface of the fixed base 1 It is arranged in the same direction as the installation surface in the motion platform 2; the rotation pair connection hole of the upper link 303 in each configuration B motion branch chain 3 is connected with the rotation pair connection shaft on the motion platform 2 to form a rotation pair; the lower link 301 The rotating pair connecting hole is connected with the rotating pair connecting shaft on the fixed base 1 to form a rotating pair.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More