

Image registration method of acoustic and visual three-dimensional imaging with underwater vehicle
A three-dimensional imaging and image registration technology, applied in image analysis, image data processing, instruments, etc., can solve the problems of phase correlation technology, image cannot be axially aligned, image distortion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
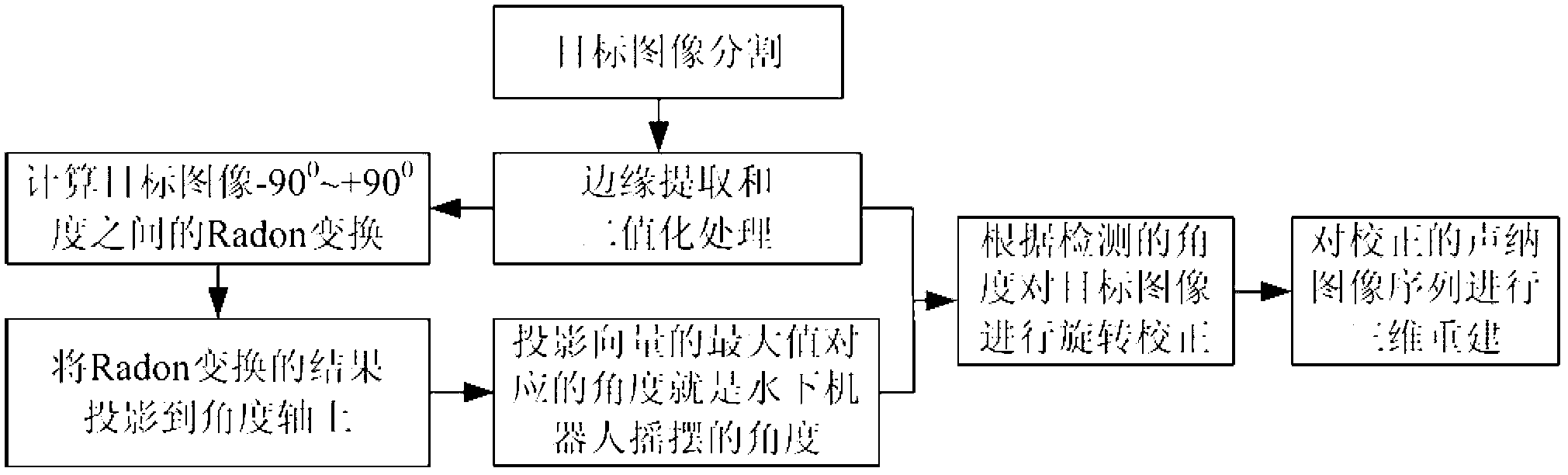
[0044] In order to overcome the target sonar image rotation caused by the swing of the underwater robot and eliminate the adverse effects of distortion and distortion of the three-dimensional reconstruction, the present invention provides a method for automatically detecting the image rotation angle and correcting it. This method does not require prior knowledge such as reference images, and can adaptively align the target's two-dimensional sonar image sequence in the vertical axis to achieve image sequence registration during three-dimensional reconstruction.
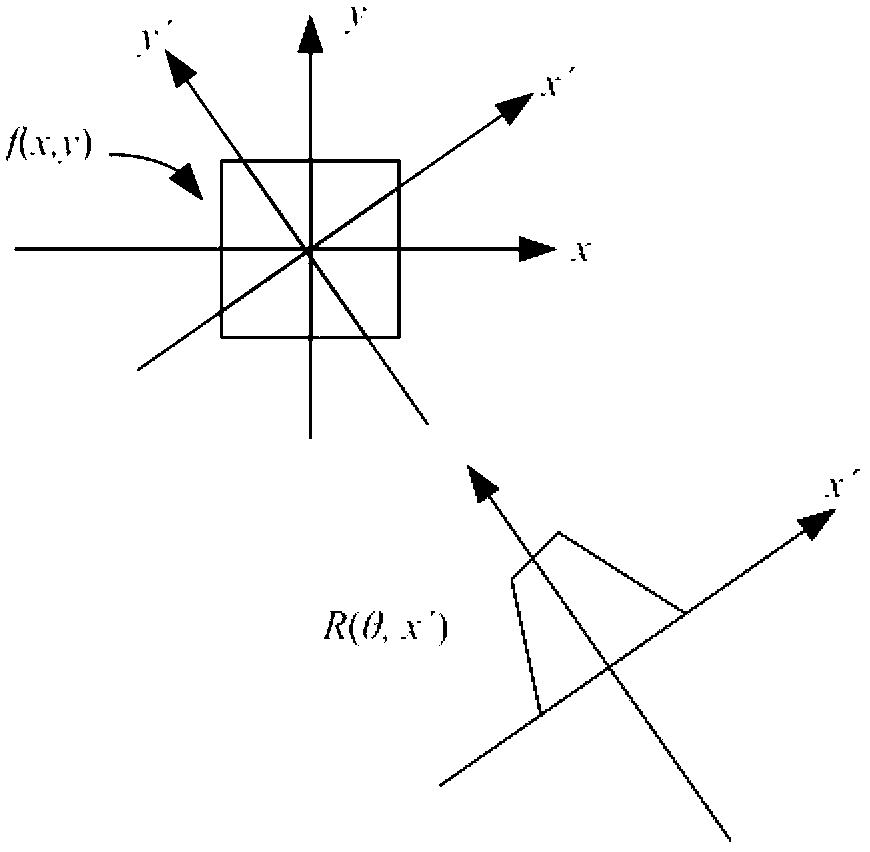
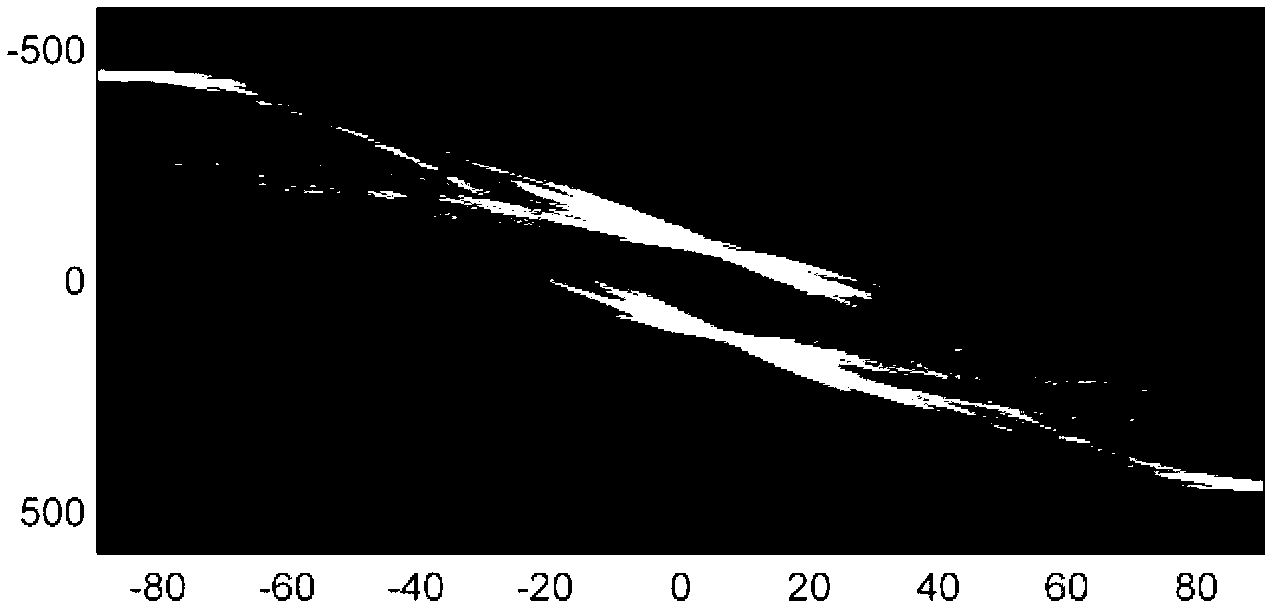
[0045] The invention is a method specifically designed for underwater robots to use high-resolution image sonar to detect underwater targets such as dams, ports, pipelines and bridge piers. Its working principle is to use the rich features contained in the boundary of the target to move relatively stable in the vertical direction, and use the Radon transform to detect the relative rotation angle of each frame of image.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More