

Trigger method of linear scanning industrial camera with filter function based on ISA (industry standard architecture) bus
A line scan and industrial camera technology, applied to color TV parts, TV system parts, TVs, etc., can solve the problems of not being able to guarantee the mechanical beam, not being able to trigger the camera once, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
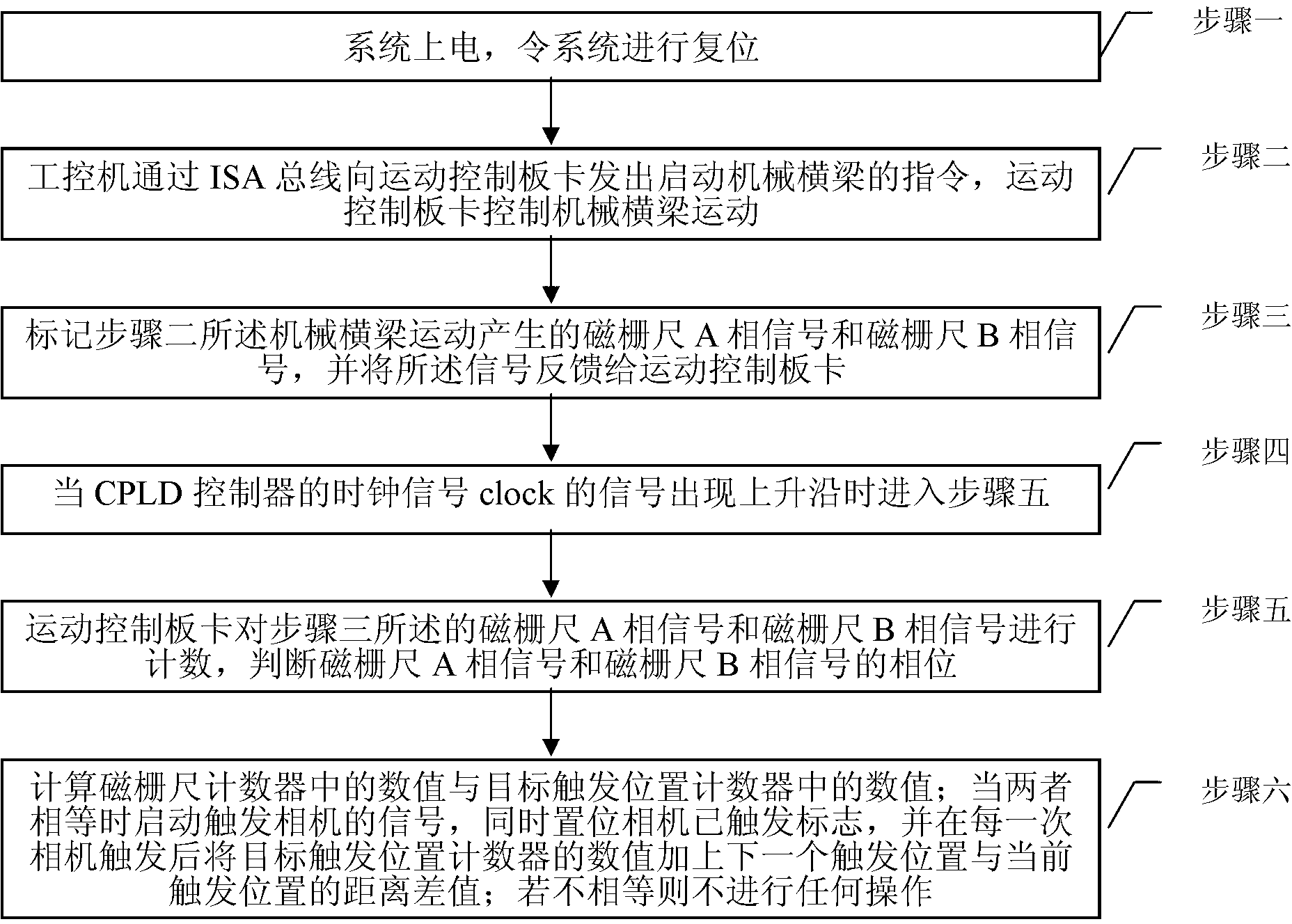
[0020] Specific implementation mode 1. Combination figure 1 This specific embodiment will be described. A method for triggering a line scan industrial camera with a filtering function based on an ISA bus, comprising the following steps:
[0021] Step 1: Power on the system to reset the system;
[0022] The reset is to use the CPLD controller on the motion control board to initialize the magnetic scale pulse number counter, the magnetic scale A phase signal shift counter, the magnetic scale B phase signal shift counter, the target trigger position counter and the trigger signal width counter;
[0023] Step 2: The industrial computer sends an instruction to start the mechanical crossbeam to the motion control board through the ISA bus, and the motion control board controls the movement of the mechanical crossbeam;
[0024] Step 3: mark the magnetic scale A phase signal and the magnetic scale B phase signal generated by the mechanical beam movement in step 2, and feed back the...
specific Embodiment approach 2
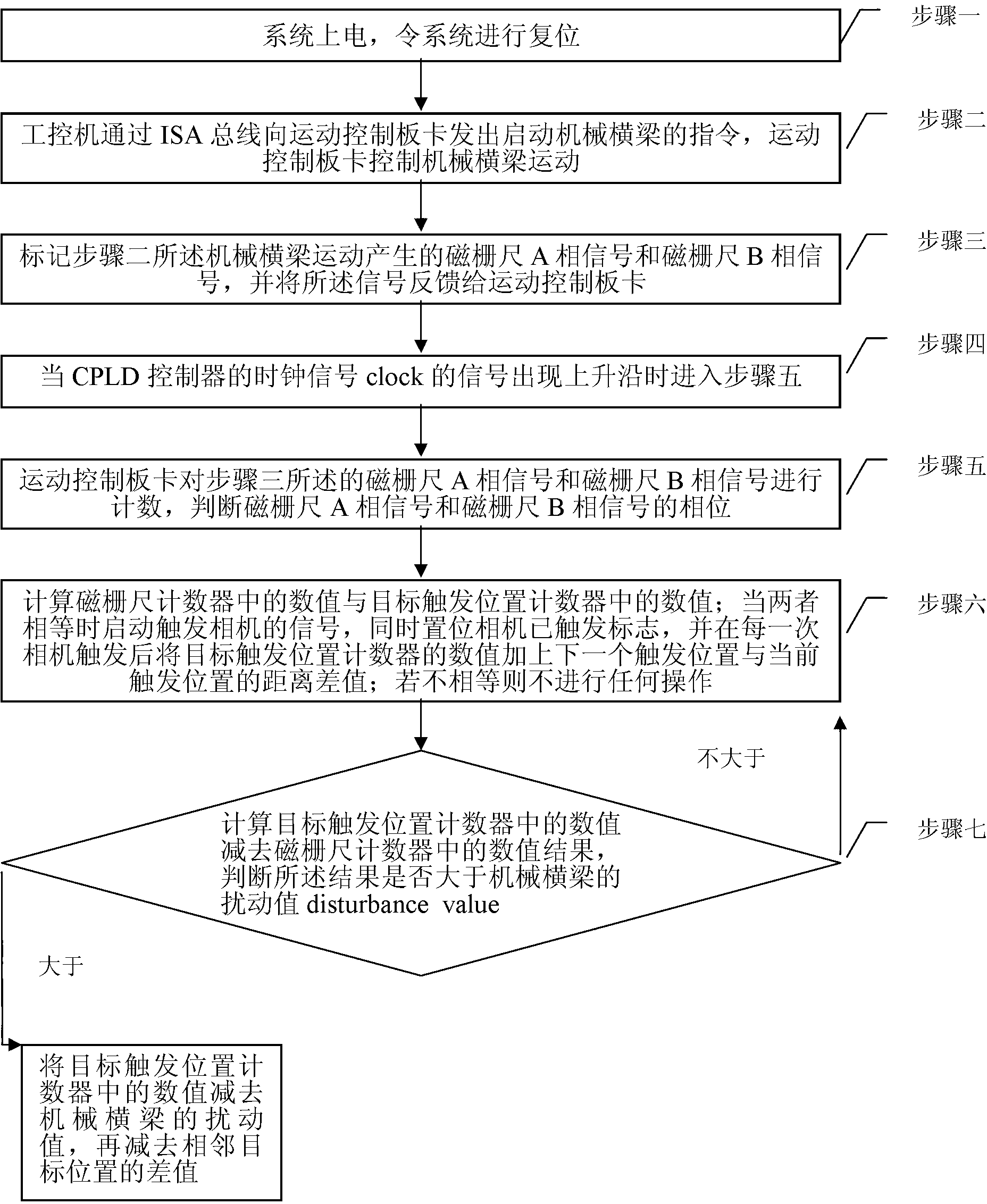
[0031] Specific Embodiment 2. The difference between this specific embodiment and specific embodiment 1 is that after starting the trigger camera signal in step 6, step 7 is also included: calculating the value in the target trigger position counter minus the value in the magnetic scale counter As a result, it is judged whether the result is greater than the disturbance value disturbance_value of the mechanical beam;
[0032] If it is not greater than the disturbance value disturbance_value of the mechanical beam, return to step 6;
[0033] If it is greater than the disturbance value disturbance_value of the mechanical beam, subtract the value in the target trigger position counter from the disturbance value disturbance_value of the mechanical beam, and then subtract the difference between adjacent target positions.
[0034] The target position is the trigger position (the position where the camera needs to be triggered when the camera moves here). There are a series of trigge...
specific Embodiment approach 3
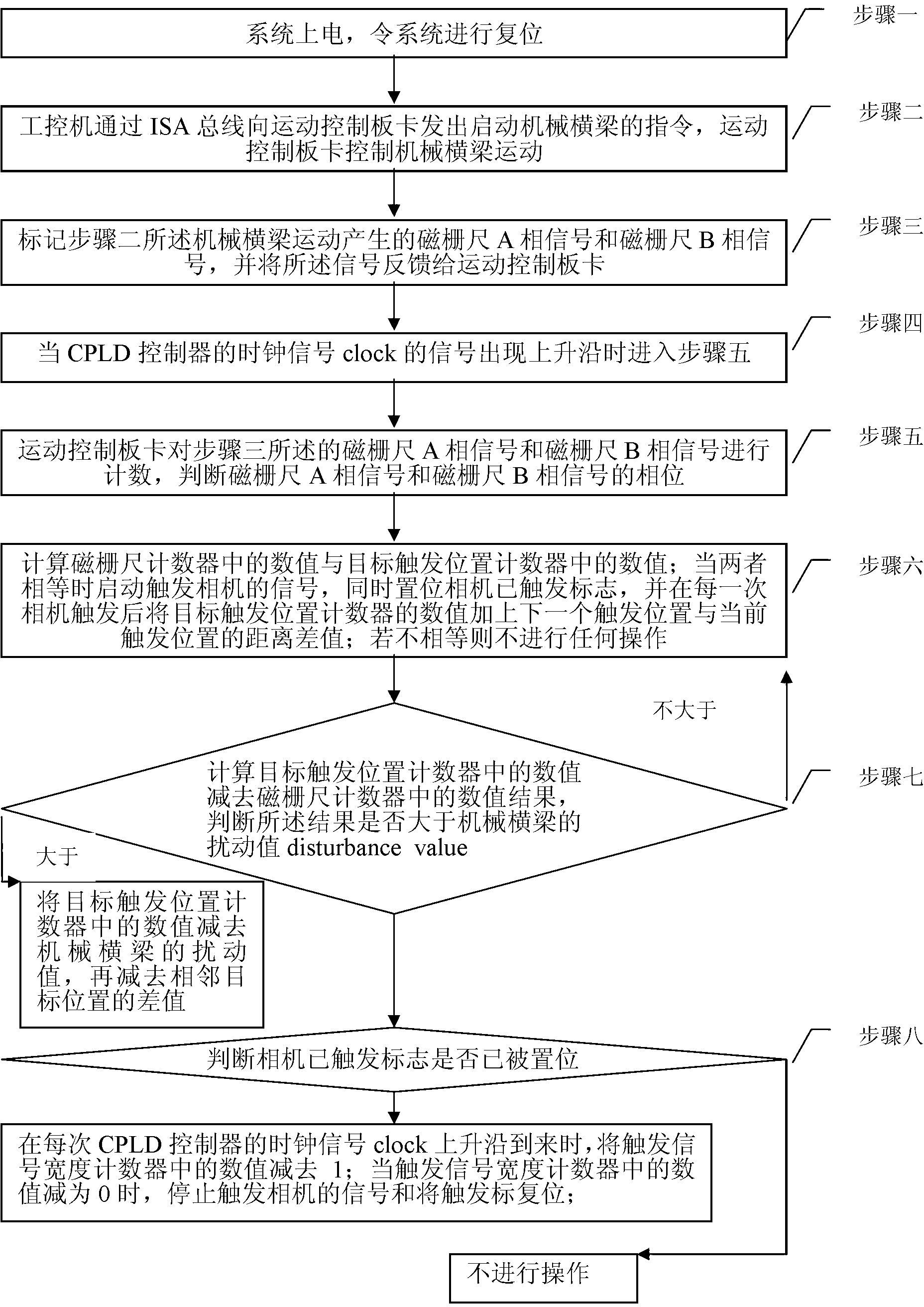
[0038] Embodiment 3. This embodiment is different from Embodiment 2 in that step 7 includes step 8 after subtracting the difference between adjacent target positions: judging whether the camera has triggered the flag camera_flag to be set;
[0039] If it has been set, when the rising edge of the clock signal clock of the CPLD controller arrives, the value in the trigger signal width counter is subtracted by 1;
[0040] When the value in the trigger signal width counter is reduced to 0, stop triggering the camera signal camera_line and reset the trigger flag camera_flag;
[0041] If not set, no operation is performed.
[0042] This step makes the width of the signal camera_line that triggers the camera equal to the period of the trigger signal width counter multiplied by the CPLD clock signal clock. By changing the value in the trigger signal width counter, the width of the signal camera_line that triggers the camera can be set arbitrarily. Only by using this specific implemen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More