

Asymmetrical five-degree-of-freedom parallel serial robot
A degree of freedom, asymmetric technology, applied in the field of robots, can solve the problems of reducing the working space, low precision, complex mechanism, etc., to reduce the complexity, improve the accuracy of the whole machine, and reduce the cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
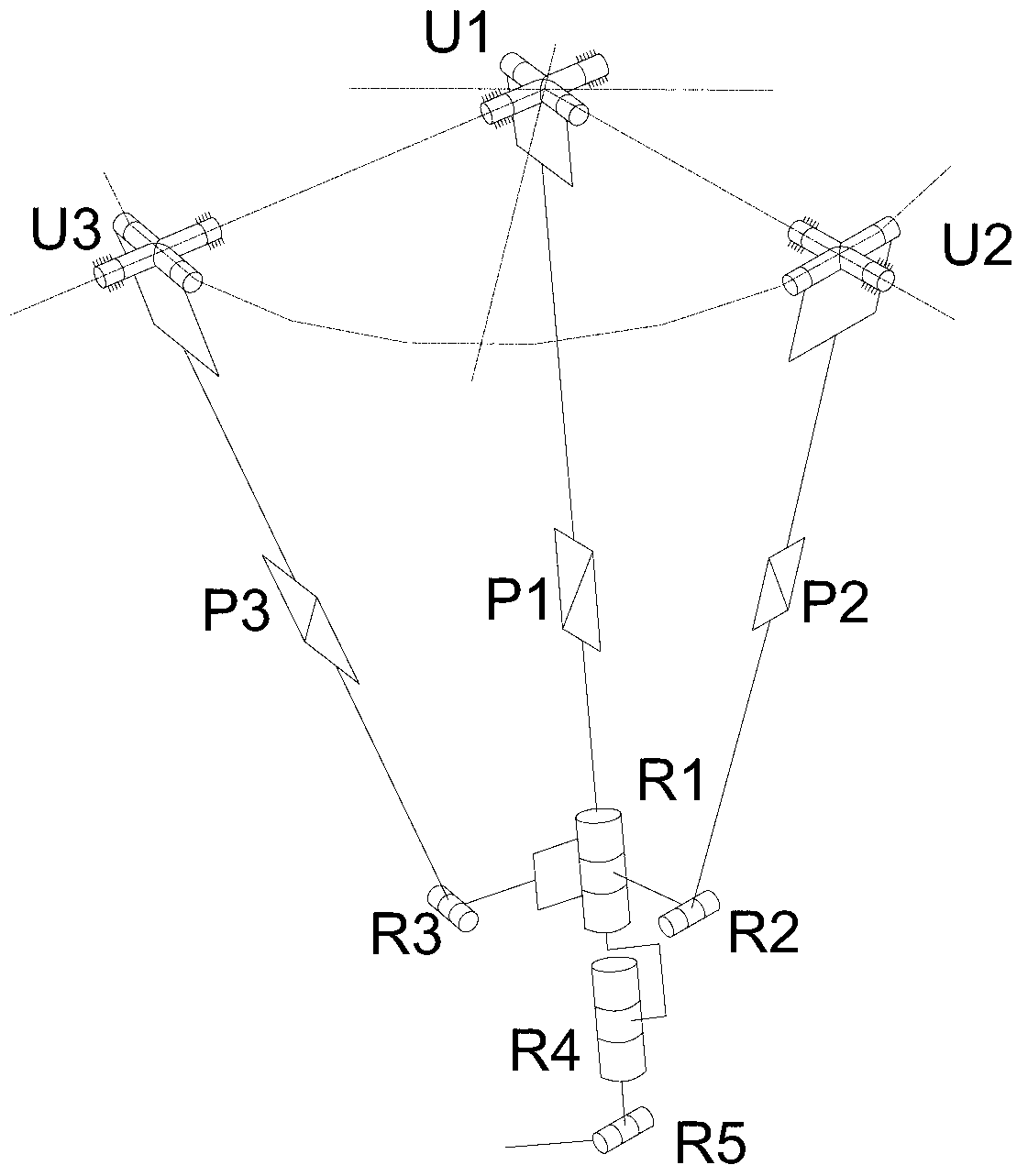
[0023] see figure 1 , figure 1 It is the mechanism topological structure diagram of the present invention, there are three branch chains, the first branch chain has a Hooke hinge U1 and a moving pair P1; the second branch chain has a Hooke hinge U2, a moving pair P2 and two Revolving pair R2, R1; the third branch chain has a Hooke hinge U3, a moving pair P3 and a rotating pair R3. Among them, Hookee hinges U2 and U3 are distributed on both sides of Hookee hinge U1, and the hinge rotation axes of the ground ends of Hookee hinges U1 and U3 are collinear; then a mechanism with two degrees of freedom in rotation is connected in series at the end of the first branch, and its revolving pair are R4 and R5, and their rotation axes are perpendicular...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More