

Six-degree-of-freedom parallel robot comprising integrated rotating supports
A technology of rotating brackets and degrees of freedom, applied in the field of robotics, can solve problems such as complex assembly process, large number of mechanism hinges and components, complex structure, etc., to achieve the effect of reducing manufacturing costs, reducing processing costs, and improving assembly accuracy
Active Publication Date: 2022-01-04
TIANJIN UNIV
View PDF5 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
This robot reduces the number of hinges in some mechanisms. However, since the six active adjustment devices are respectively connected to the static platform for this type of robot, the number of hinges and components of the mechanism is still large and the structure is complex.
And in order to ensure that the movement of two groups of active adjustment devices is always in the same plane, the assembly process is more complicated
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0027] Embodiment 1: Equipped with an electric spindle on the moving platform 6, it can be built as image 3 The six degrees of freedom manufacturing equipment and systems shown.
Embodiment 2
[0028] Embodiment 2: The six-degree-of-freedom parallel robot module is installed on a long-stroke guide rail, which can be built as Figure 4 Linear Mobile Workstation shown.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
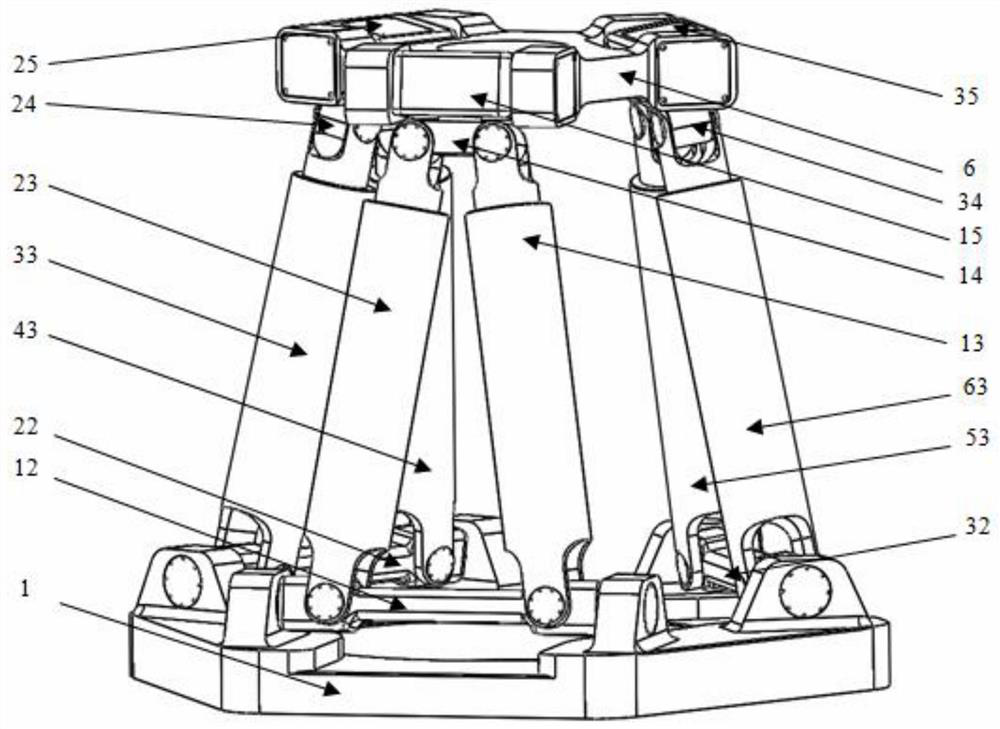
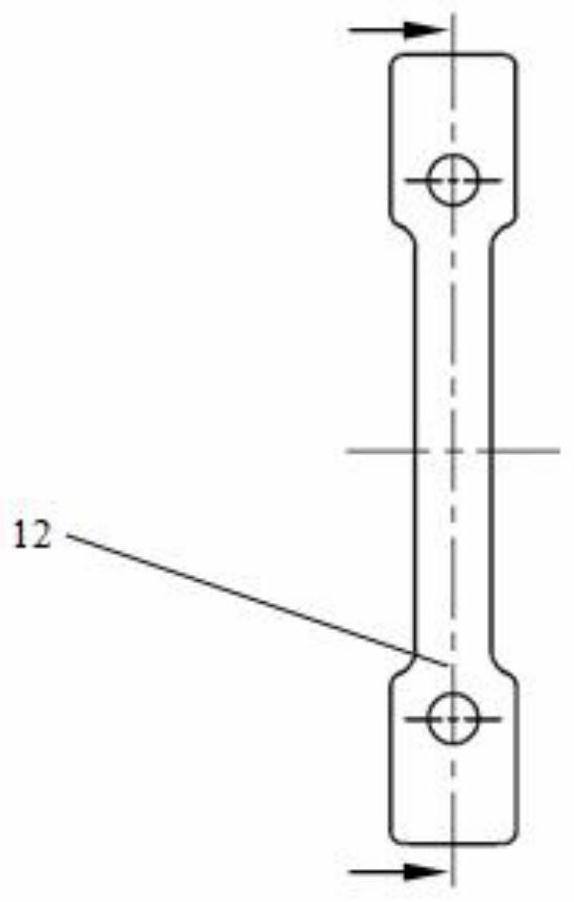
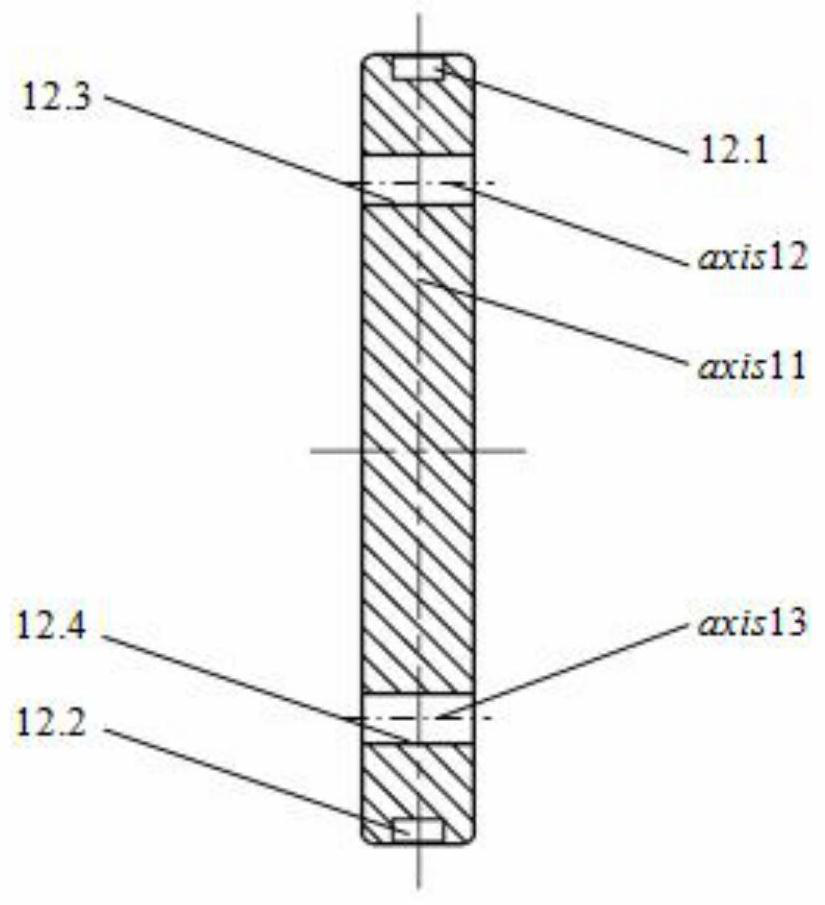
The invention discloses a six-degree-of-freedom parallel robot comprising integrated rotating supports. According to the six-degree-of-freedom parallel robot, the first integrated rotating support, a first length adjusting device, a second length adjusting device, a first vertical rotating shaft and a first horizontal rotating shaft form a first motion branch chain. A second motion branch chain and a third motion branch chain are similar in composition. The first integrated rotating support is rotationally connected to a static platform through a hinge with one degree of freedom. One end of the first length adjusting device and one end of the second length adjusting device are both connected to the first integrated rotating support, and the other end of the first length adjusting device and the other end of the second length adjusting device are connected to the first vertical rotating shaft through hinges. One end of the first horizontal rotating shaft is connected to the first vertical rotating shaft through a hinge, and the other end of the first horizontal rotating shaft is connected to a dynamic platform through a hinge. The length adjusting devices share one integrated rotating support, the number of the hinges can be effectively reduced, the assembling process is simplified, and the installation precision is guaranteed. The whole machine is flexible to move, simple in kinematics solution and convenient to implement and control.
Description
technical field [0001] The invention relates to the field of robots, in particular to a six-degree-of-freedom parallel robot with an integrated rotating bracket. Background technique [0002] The Stewart platform, which has been widely used, is a six-degree-of-freedom parallel robot, including a static platform, and one end of six active adjustment devices that can be extended or shortened in the axial direction is connected to the static platform through a hinge with a rotational degree of freedom. , and the other ends are respectively connected to the moving platform through a hinge with one rotational degree of freedom. However, the robot does not have an integrated rotating bracket, and the six active adjustment devices are respectively connected to the static platform and the dynamic platform, resulting in a large number of hinges, many components, a complicated structure, and it is difficult to ensure assembly accuracy. [0003] A six-degree-of-freedom parallel robot ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Applications(China)
IPC IPC(8): B25J9/00
CPCB25J9/0045
Inventor 刘海涛韩家乐许可山显雷李皓黄田肖聚亮梅江平秦旭达
Owner TIANJIN UNIV