

Human-simulated mechanical arm
A technology of robotic arms and arms, applied in the field of humanoid robotic arms, can solve problems such as high cost, difficult to popularize, and complex structure, and achieve the effects of low cost, broad application prospects, and few degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] It is easy to understand that, according to the technical solution of the present invention, those skilled in the art can imagine various implementations of the humanoid robotic arm of the present invention without changing the essence and spirit of the present invention. Therefore, the following specific embodiments and drawings are only exemplary descriptions of the technical solution of the present invention, and should not be regarded as the entirety of the present invention or as a limitation or limitation on the technical solution of the present invention.
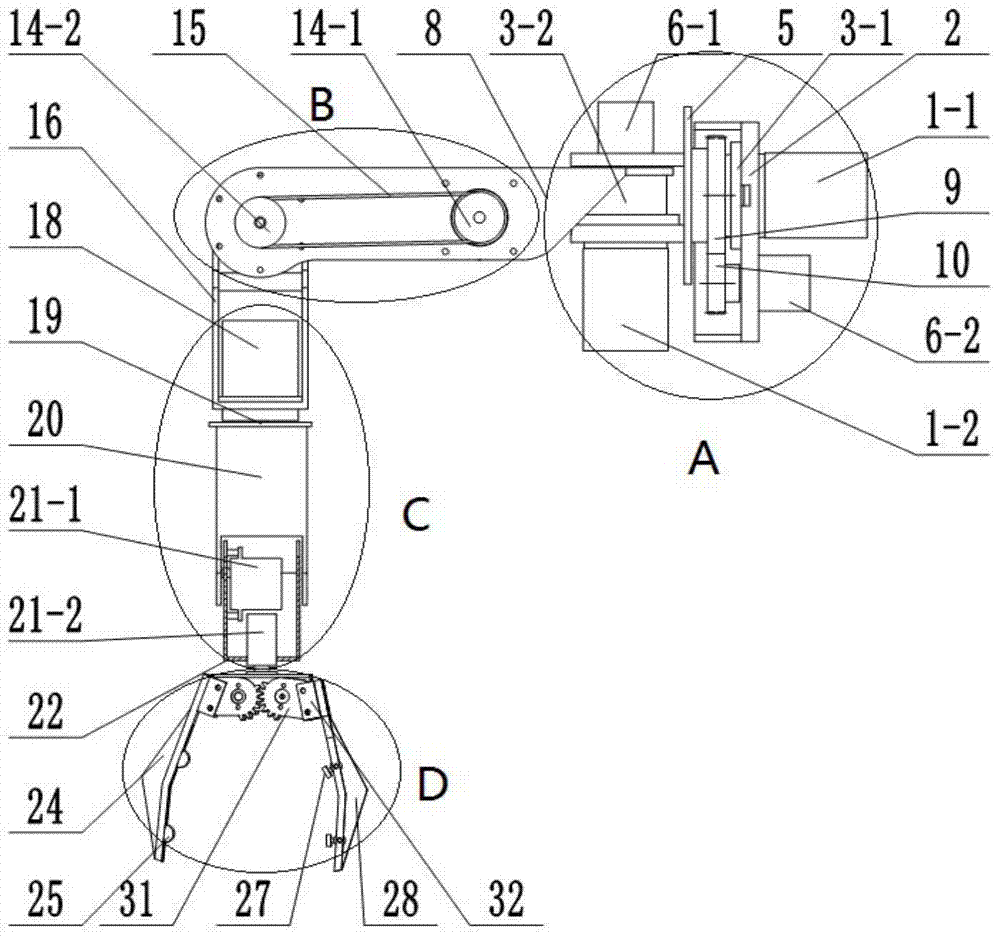
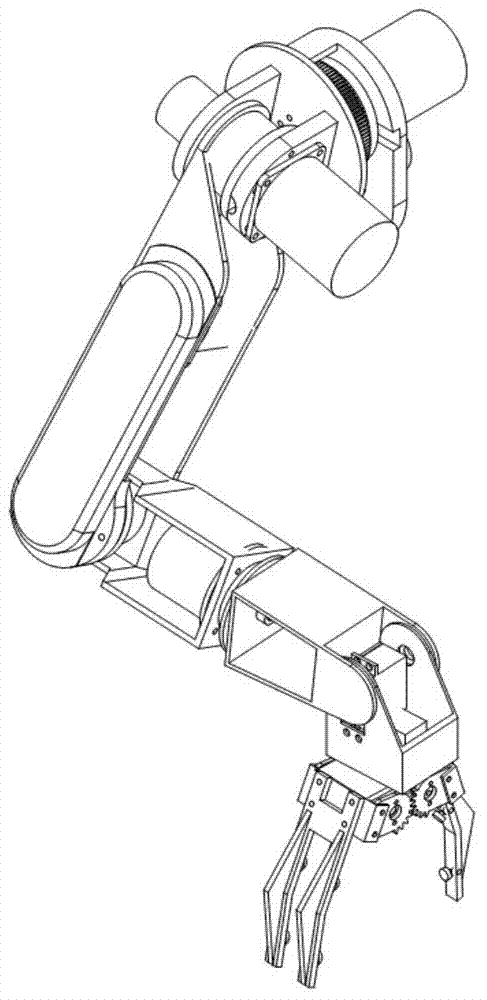
[0025] to combine figure 1 and figure 2 , the humanoid robotic arm of the present invention includes six degrees of freedom of the arm, and one degree of freedom of opening and closing the gripper. The 6 degrees of freedom of the arm are divided into three degrees of freedom at the front end of the arm and three degrees of freedom at the end of the wrist. Each degree of freedom is controlled by a motor. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More