

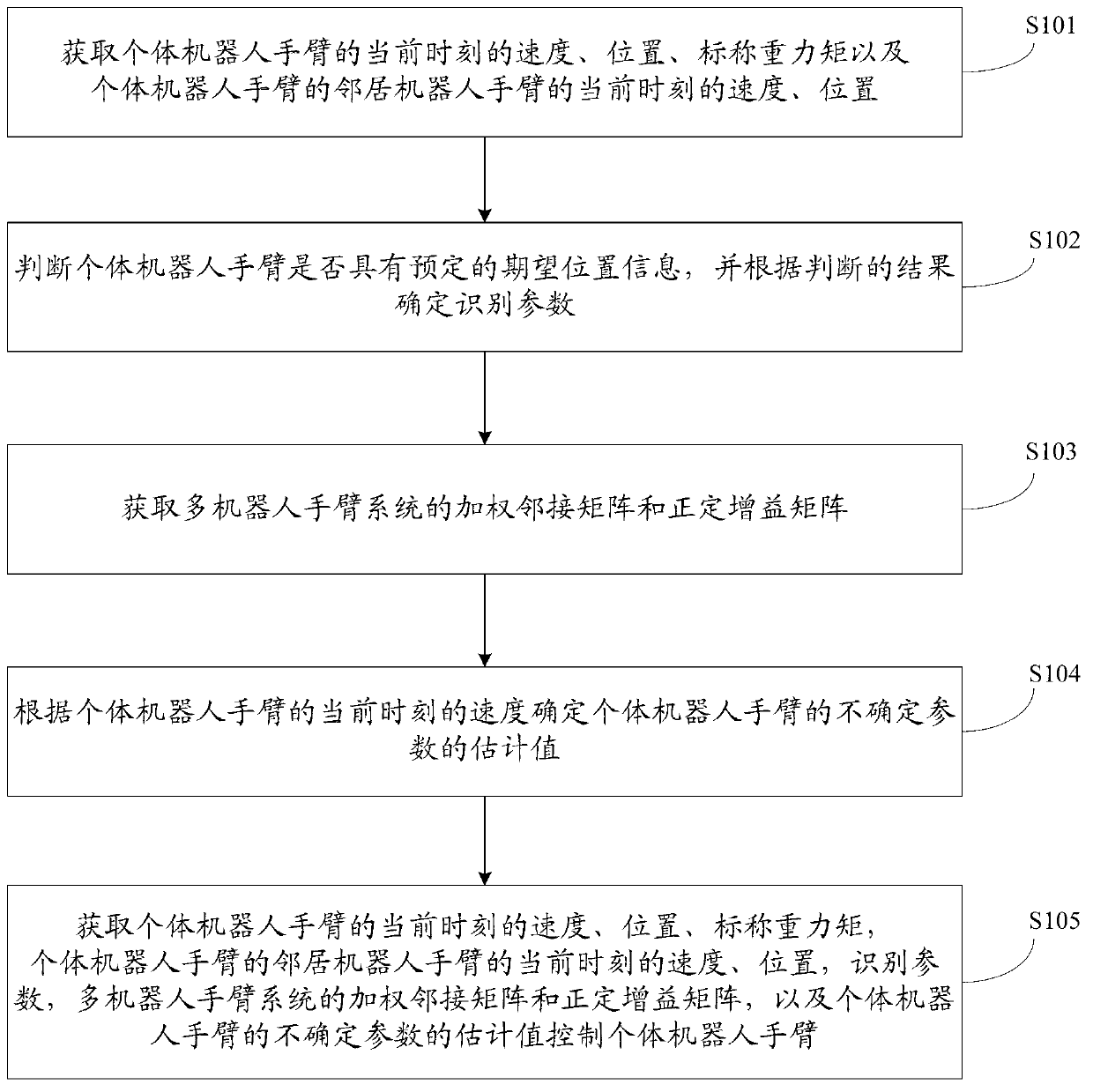
Self-adaptive coordination control method of multi-robot-arm system
A robot arm and multi-robot technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of low control accuracy, uncertain external interference of the robot arm, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
[0027] In the description of the present invention, it should be understood that the terms "first", "second" and so on are used for descriptive purposes only, and should not be understood as indicating or implying relative importance. In the description of the present invention, it should be noted that unless otherwise specified and limited, the terms "connected" and "connected" should be understood in a broad sense, for example, it can be a fixed connection, a detachable connection, or an integral Ground connection; it can be mechanical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More