

Robot capable of crawling on flexible surface
A crawling robot and flexible surface technology, applied in the field of robotics, can solve the problems of inflexible steering, complex structure, easy to fall off, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
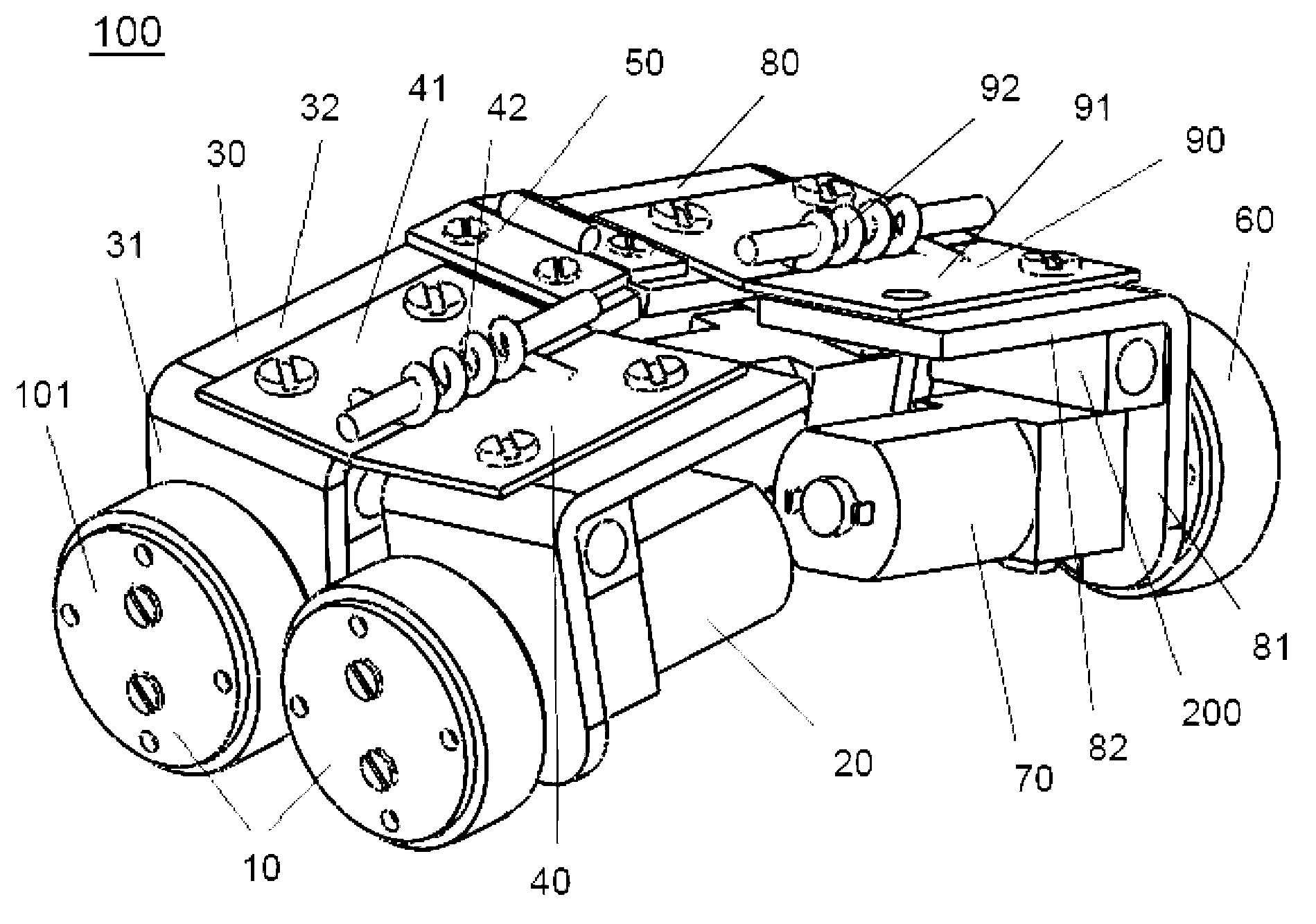
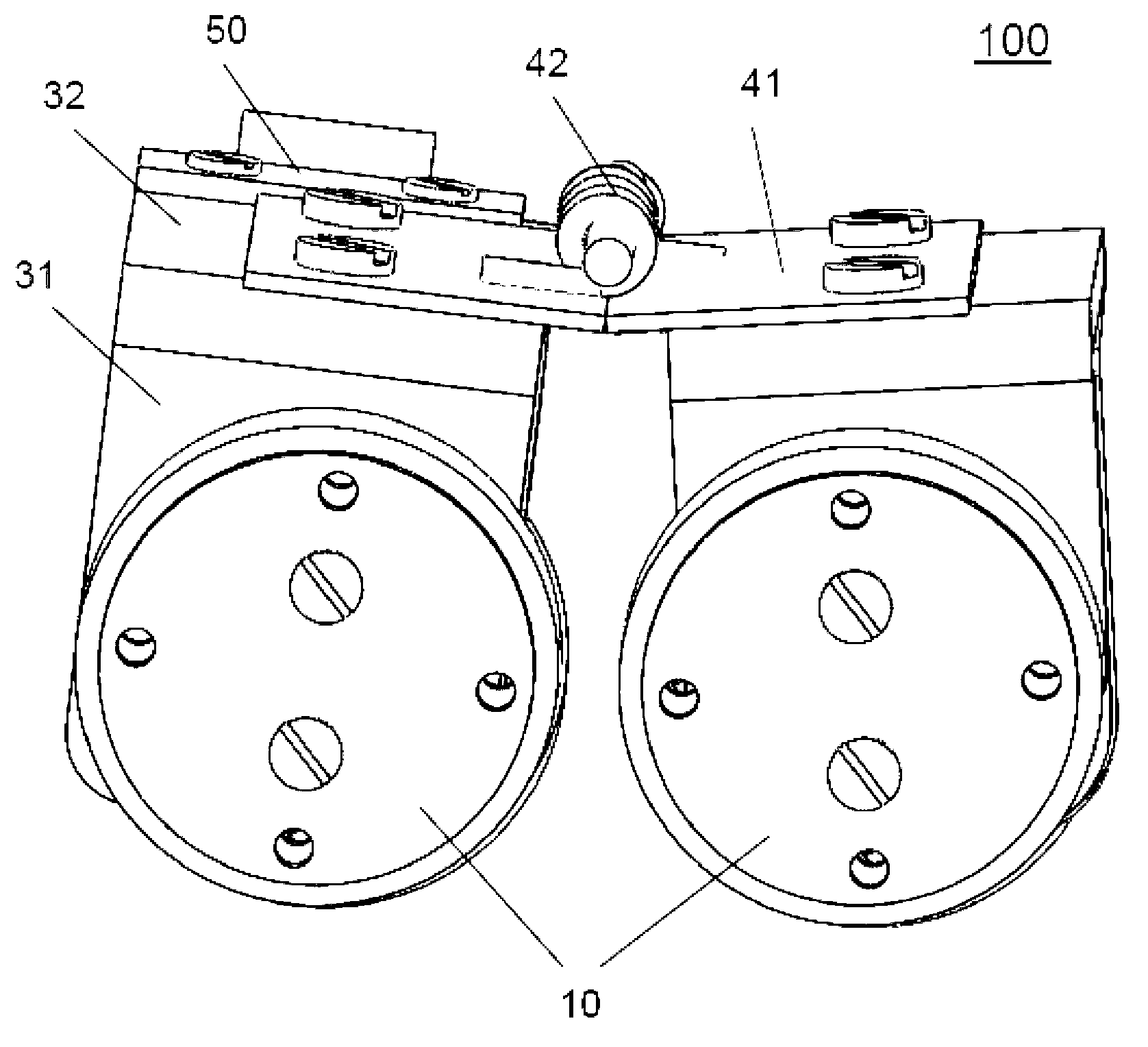
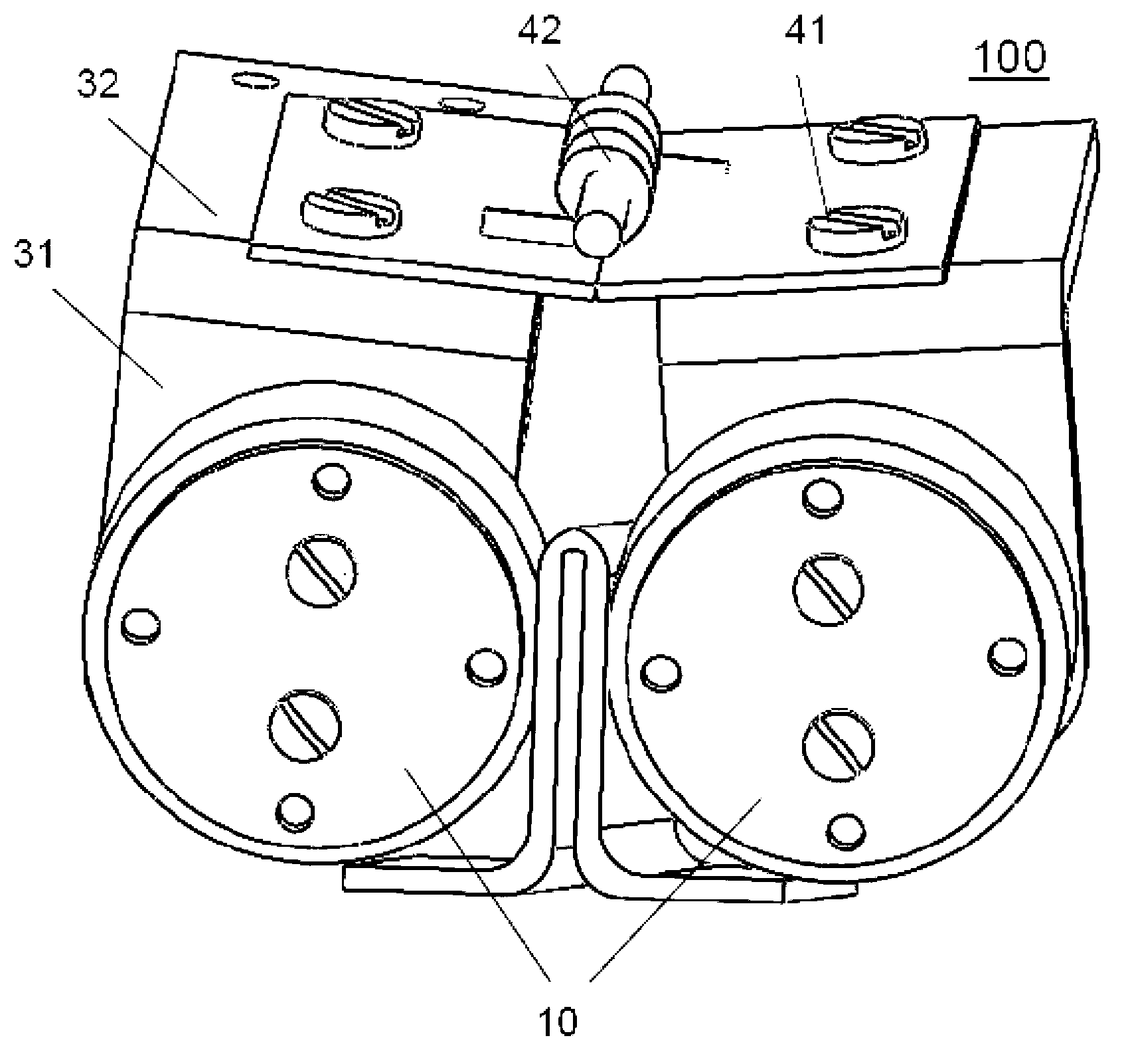
[0024] Please refer to figure 1 , the flexible surface crawling robot 100 of this embodiment includes pinch wheels, motors connected to the pinch wheels, and fixtures for installing the motors. The pinch wheel includes a first pinch wheel 10 and a second pinch wheel 60 , and the motor includes a first motor 20 for driving the first pinch wheel 10 to rotate and a second motor 70 for driving the second pinch wheel 60 to rotate.
[0025] Specifically, in this embodiment, the flexible surface crawling robot 100 includes a pair of first clamping wheels 10, a first motor 20 respectively connected to the first clamping wheels 10, and a pair of first motors 20 respectively installed on the second motor 20. Fixture 30. The pair of first fixing parts 30 are connected by a first connecting part 40 . The flexible surface crawling robot 100 also includes a pair of second clamping wheels 60 , second motors 70 respectively connected to the second clamping wheels 60 , and a pair of second f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More