Method for improving sampling antijamming capability of fixed period numerical control system
A digital control system and fixed-period technology, applied in the direction of digital control, electrical program control, etc., can solve problems such as increasing system complexity, achieve the effect of improving anti-interference and avoiding interference of fixed frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
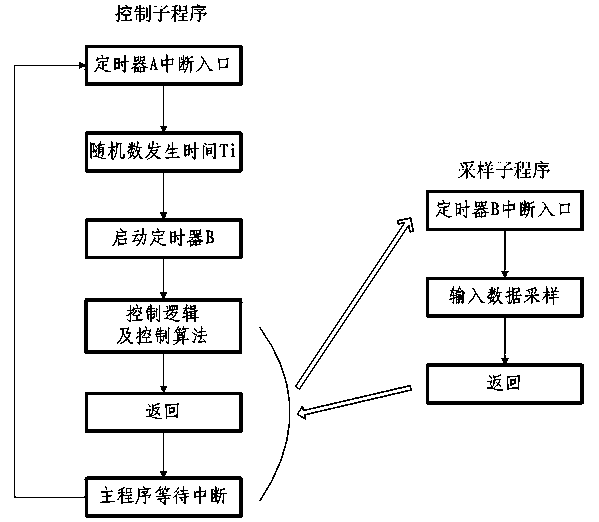
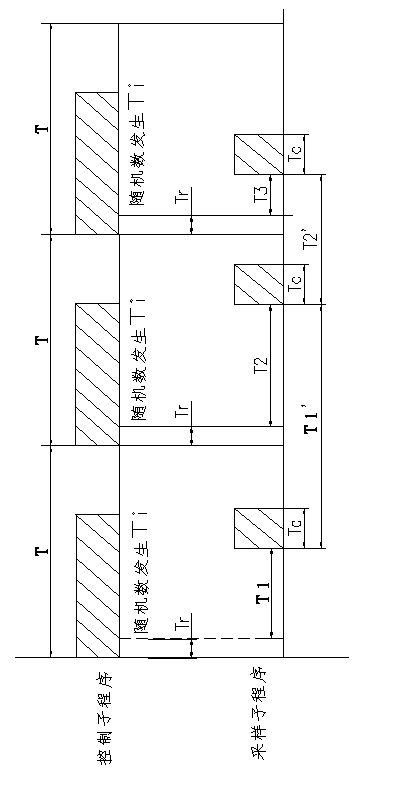
[0014] like figure 1 As shown, a digital control system, its control subroutine is a subroutine that runs repeatedly with a fixed cycle T generated by timer A. When the timer A’s timing interrupt time T arrives, it enters the interrupt processing program, and the program first runs the random number Generate a sub-function to generate a random number, which represents time T i (T i including T 1 ,T 2 ,T 3 ,...a series of random times), and then start a timer B, whose timing time is the time T generated by the above random number i , and then the control subroutine continues to run its control logic or control algorithm, and returns to the main program after completion to continue waiting for timer A to interrupt; at the same time, after the control subroutine starts timer B, once the timer B's timing interrupt time T i When it arrives, set the interrupt priority of the sampling subroutine higher than that of the control subroutine, and immediately enter the data sampling ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap