

Binocular vision navigation system and method based on power robot
A technology of binocular vision and navigation system, applied in the field of binocular vision navigation system based on electric robots, can solve the problems of obstacle detection error, complex image background, road surface interference and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
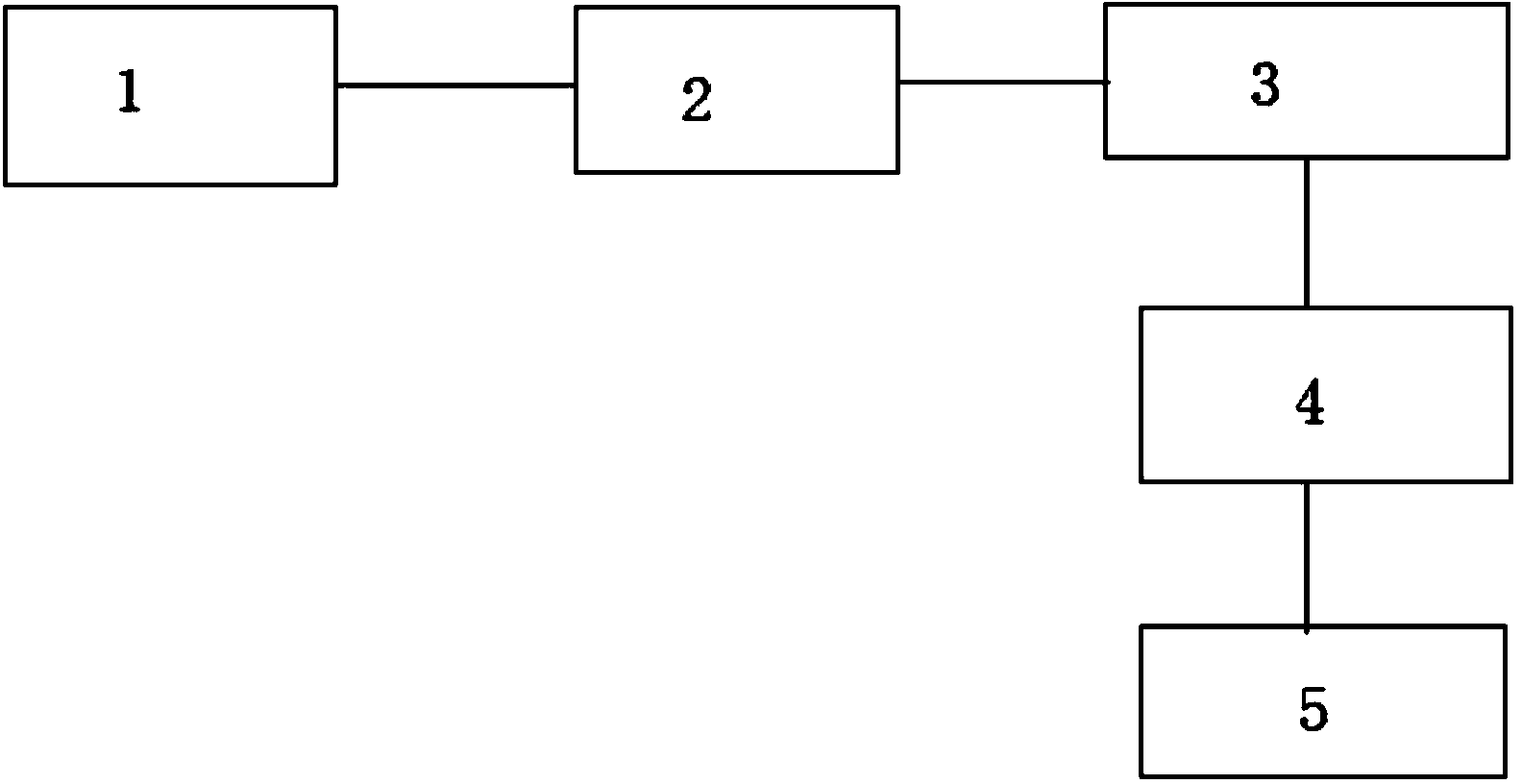
[0065] Such as figure 1 As shown, the image acquisition system 1: the image acquisition system 1 includes a binocular camera, the binocular camera is connected to the image acquisition card through an image transmission line, the binocular camera collects the environmental image on the road ahead of the electric robot, and then passes the collected image through the image The transmission line is uploaded to the image acquisition card, and the image acquisition card transmits the collected environmental images on the road to the visual analysis system 2;
[0066] Visual analysis system 2: According to the binocular image information collected by image acquisition system 1 and the internal and external parameter information of the camera, the obstacle detection in the road area of the substation is realized through the reverse projection theory and 3D ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More