

Path planning method of moving robot under dynamic and complicated environment
A mobile robot, complex environment technology, applied in two-dimensional position/channel control and other directions, can solve the problems of low operation efficiency, insufficient research, and little research.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] A non-limiting embodiment is given below in conjunction with the accompanying drawings to further illustrate the present invention.
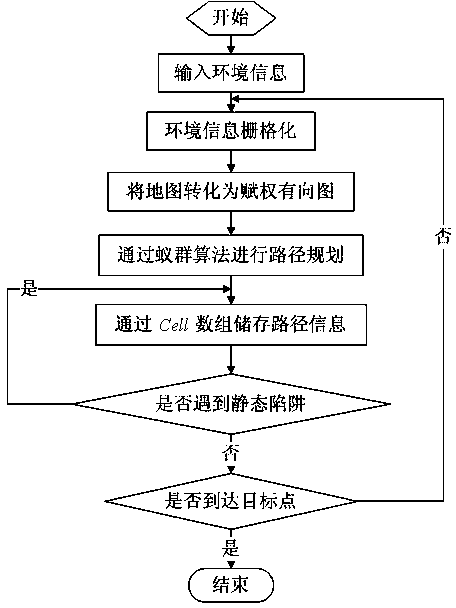
[0024] refer to Figure 1-Figure 2 As shown, the specific steps of the global path planning under the dynamic environment of the present invention are: comprise the following steps:
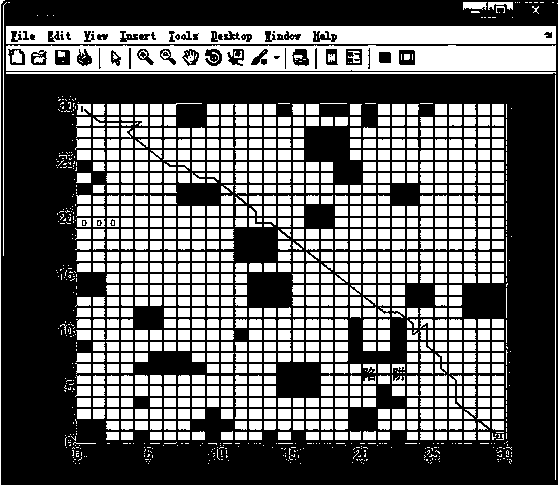
[0025] 101. Establish a global static environment map according to the motion environment of the mobile robot, initialize the position information of the global static environment map, including the starting point position and the target point position of the mobile robot's movement path, the static obstacle position in the global static environment map and the robot For the position of the motion trap, the global static obstacle grid map is obtained by overlaying the global static environment map with the grid method, and the starting point position and the target point in the global static obstacle grid map are marked by the serial number method, see fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More