

A Path Planning Method for Mobile Robots in Dynamic Complex Environment
A mobile robot, complex environment technology, applied in two-dimensional position/channel control and other directions, can solve the problems of the program falling into an infinite loop, not much research, and many nodes for traversal calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] A non-limiting embodiment is given below in conjunction with the accompanying drawings to further illustrate the present invention.
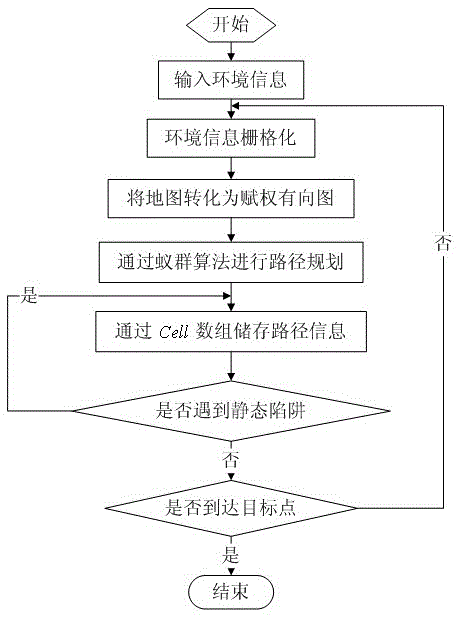
[0022] refer to Figure 1-Figure 2 Shown, the specific steps of the global path planning under the dynamic environment of the present invention are:
[0023] Step 1: Establish a global environment map based on the actual complex environment, including: starting point information for path planning, target point information, and known static obstacle information and trap information in the environment map.
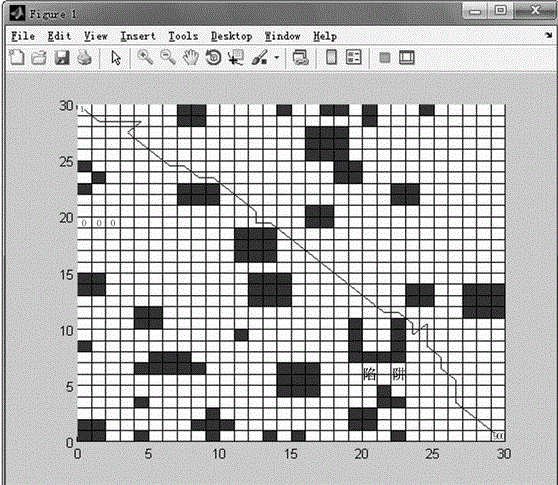
[0024] Simulate the actual complex environment as a 01 matrix, that is, the elements in the matrix are either 0 or 1. The number 0 represents the movable free position information in the actual environment, and the number 1 represents the position information of the static obstacle in the actual environment. The starting point is the first non-1 position in the upper left corner, and the ending point is the last non-1 position in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More