

Airplane simulation manipulator with operating force feel
A technology of aircraft simulation and control device, which is applied in the field of digital simulation control of aircraft cockpit, can solve the problems of real-time change of control force, large physical space of hydraulic control system, and inability to realize follow-up function, etc., and achieve the effect of realizing follow-up function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Below in conjunction with accompanying drawing, the technical scheme of invention is described in detail:
[0019] The control device should be able to reflect the force characteristics of the steering wheel, steering stick, and pedals of the simulated aircraft, and can adjust the force characteristics in real time according to the aerodynamic load of the rudder surface in different flight states of the aircraft in actual flight, and realize the autopilot. move function. Real-time and realistically reproduce the static and dynamic characteristics of the control system of the aircraft under different flight conditions and different control modes (automatic, manual, emergency).
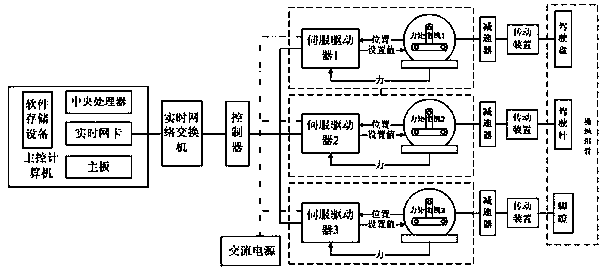
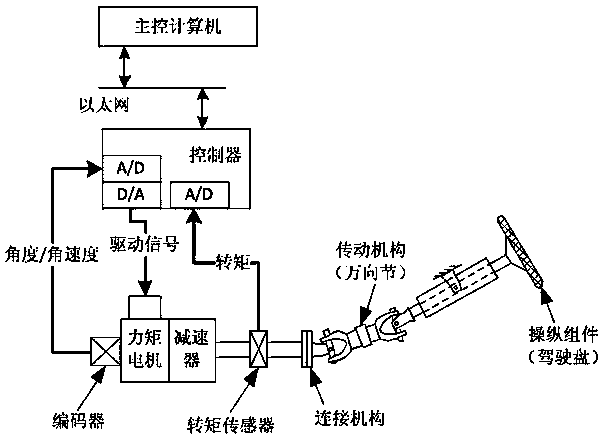
[0020] Such as figure 1 As shown, the aircraft simulation control device with a sense of control force includes
[0021] Three control channels respectively provide control force sense for the steering wheel, steering rod and pedal components. The control component transmits the reaction force ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More