

Ultrasonic positioning device and method for four-rotor unmanned aerial vehicle
A quadrotor UAV and positioning device technology, applied in positioning, measuring devices, radio wave measurement systems, etc., can solve problems such as difficulty in accurately locating targets, unfavorable quadrotor UAVs, and lag
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Specific embodiments of the present invention are described as follows in conjunction with accompanying drawings:
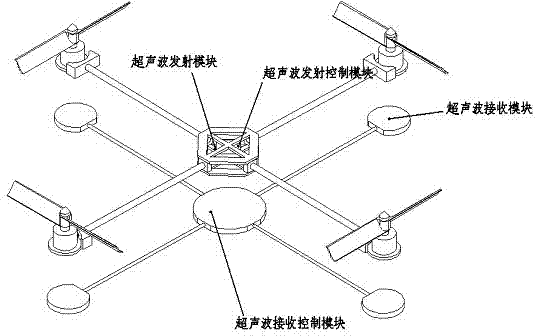
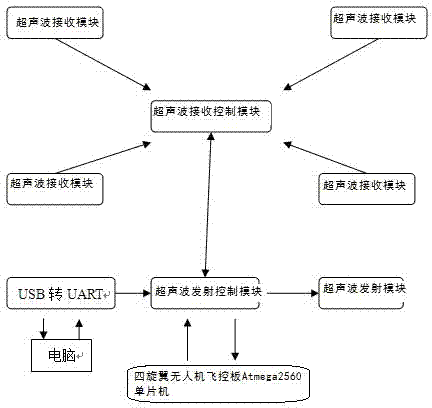
[0024] see figure 1 and figure 2 , an ultrasonic positioning device for a quadrotor UAV, comprising a quadrotor UAV, an ultrasonic emission control module, an ultrasonic emission module, an ultrasonic reception control module, and an ultrasonic reception module, wherein the ultrasonic reception control module is connected to the ultrasonic reception module, Fixed on the ground; one end of the ultrasonic emission control module is connected to the output end of the flight control board of the quadrotor UAV, and the other end is connected to the ultrasonic emission module.
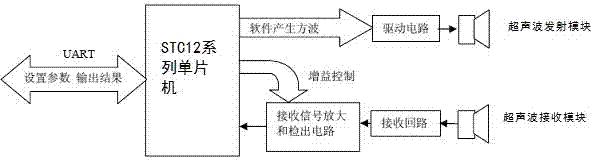
[0025] The flight control board of the four-rotor UAV uses an Atmega2560 single-chip microcomputer; the control chip of the ultrasonic emission control module and the ultrasonic reception control module of the ground adopts the STC12 series single-chip microcomputer, and the TL852 modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More