Grasping mechanical hand capable of changing according to shape of object
A technology of object shape and manipulator, applied in the mechanical field, can solve problems such as object damage, and achieve strong adaptability and powerful functions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
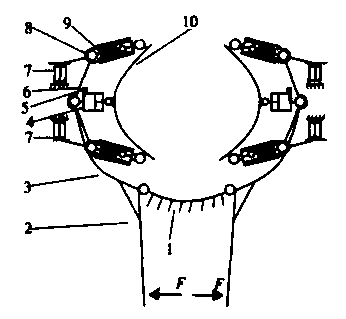
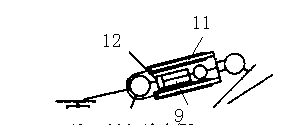
[0011] Such as Figure 1~2 , a gripping manipulator that can change with the shape of the object. This device has a left-right symmetrical structure. The structure on one side is: one end of the fixed frame 1 is hingedly connected to the tightening push rod 2 and the transmission tightening rod 3 at the same time, and the transmission tightening rod 3 The upper hinge 1# hydraulic cylinder 4, meanwhile, the pressure sensor 5 and the balance winding rod 6 are arranged on the 1# hydraulic cylinder 4; the thrust rotation mechanism 8, the 1# hydraulic cylinder 4 and the thrust rotation mechanism 8 are sequentially hinged on the transmission tightening rod 3; The hinges of the transmission tightening rod 3 and the thrust rotation mechanism 8 are connected to the 2# hydraulic cylinder 7; the other end of the 1# hydraulic cylinder 4 and the other end of the thrust selection mechanism 8 are hinged to the flexible friction belt 10 to fix them.
[0012] Working principle: when the clampi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com