

Shear mode mechanism capable of being controlled in numerical mode and shear mode mechanism drive system formed by shear mode mechanisms in combined mode
A scissor mechanism and numerical control technology, which is applied in the direction of hoisting devices and lifting frames, can solve the problems of small expansion ratio, small load capacity, inaccurate terminal positioning, etc., achieve large expansion ratio, improve load capacity and stability, Accurate effect of telescopic positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
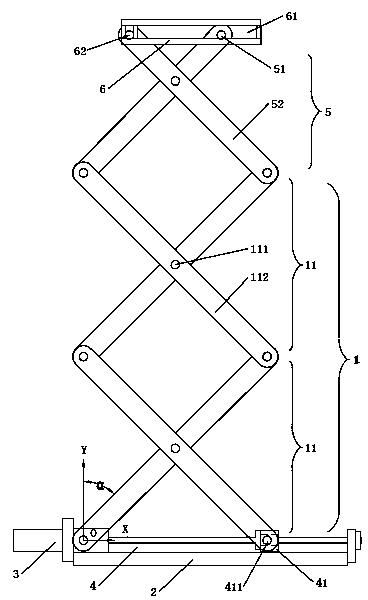
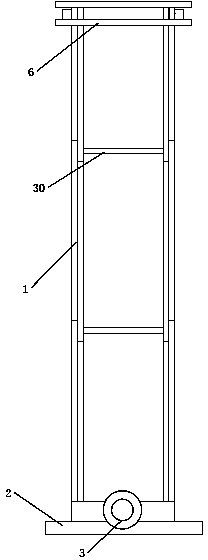
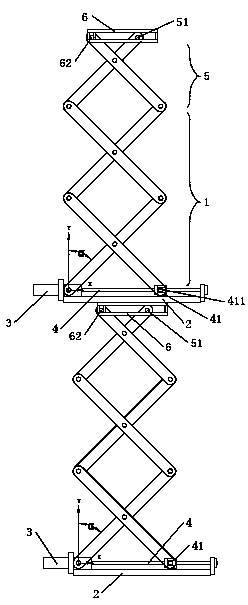
[0019] The present invention is a numerically controllable scissor mechanism, such as figure 1 , 2 As shown, it includes a bracket unit 1, a frame 2, a CNC motor 3 installed on the frame 2, and a ball wire driven by the CNC motor 3, which are hinged at least two pairs of crossed scissor brackets 11 at the ends in turn. Rod 4, one end of the bottom of the pair of scissor brackets 11 at the bottom of the bracket unit 1 is hinged on the base 2 as the origin O, and the other end is hinged on the nut 41 of the ball screw 4; the ball screw 4 and The bracket units 1 are parallel or coincident in a plan view direction. In this embodiment, there are two sets of bracket units, and each of their corresponding hinge points is synchronously connected through the connecting shaft 30, such as figure 1 , 2 As shown, this structure is often applied in the current scissor mechanism. Such as figure 1 As shown, each support unit 1 has two pairs of scissor supports 11 .
[0020] When the CNC...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More