

Multi-arm robot
A robot and rack technology, applied in the field of dobby robots, can solve the problems of difficulty in installation and maintenance, increase in weight, etc., and achieve the effects of increased rigidity and strength, high work stability, and wider application range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
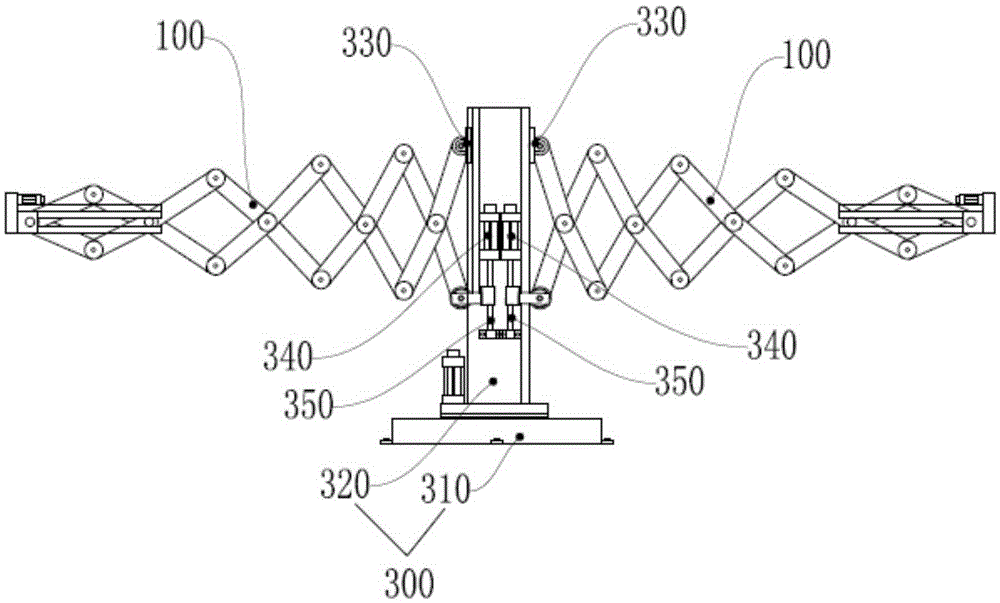
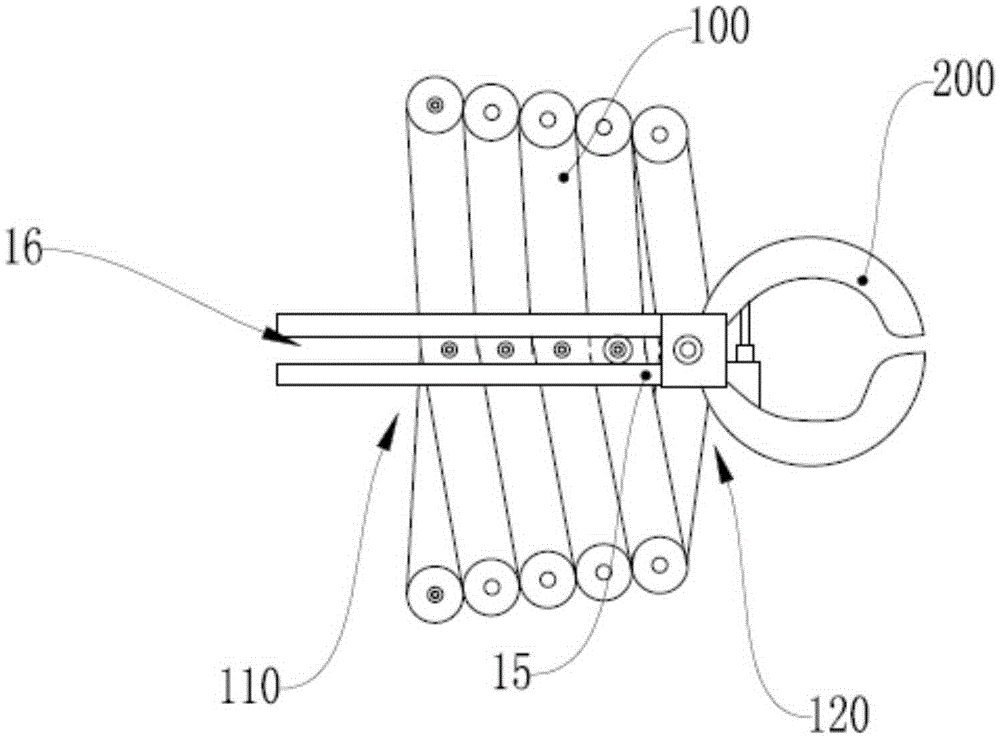
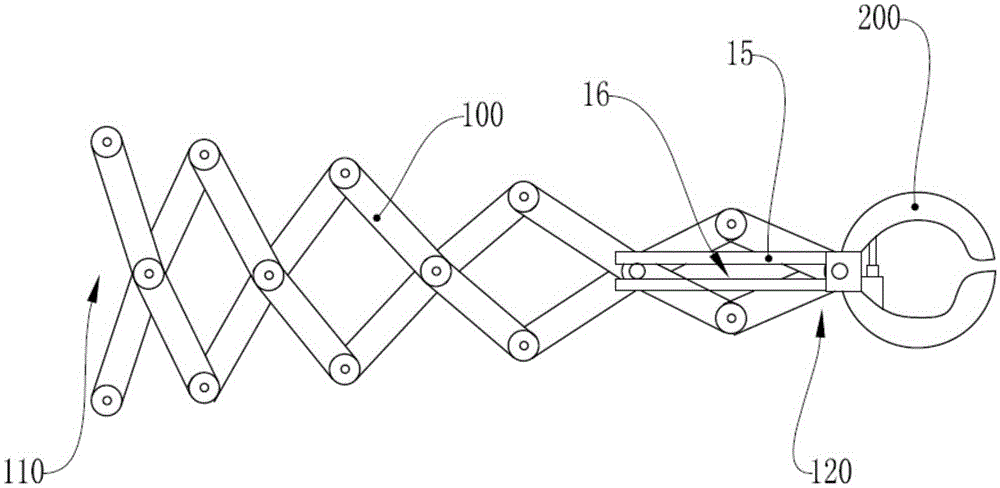
[0030] Such as Figure 1-8 As shown, a multi-arm robot includes a frame 300, two telescopic arms 100 mounted on the side of the frame 300, and a terminal working mechanism 200 mounted on one end of the telescopic arm 100;
[0031] The telescopic arm is composed of a plurality of scissor-type units 10 hinged in turn; the scissor-type unit 10 is composed of two articulated arms 11, the middle parts of the two articulated arms 11 are articulated by a rotating shaft, and the two articulated arms 11 are A hinged end 12 is provided at the end; the hinged ends 12 of the hinged arms 11 of the two adjacent scissor-fork units 10 are hinged sequentially; the telescopic arm is a telescopic support structure at both ends;
[0032] One end of the telescopic arm is the driving end 110, and the other end is the working end 120, and the terminal working mechanism 200 is an automatic clamp, which is arranged at the working end 120;
[0033] The articulated arm 11 of the scissor unit 10 provide...
Embodiment 2
[0044] Such as Figure 9 As shown, the difference between this embodiment and Embodiment 1 is that the multi-arm robot is provided with six telescopic arms 100, the column 320 is a hexagonal prism, and the six telescopic arms 100 are respectively arranged on the hexagonal prism of the six sides. The six telescopic arms 100 can move radially with the geometric center of the hexagonal prism as the center, so that the multi-arm robot can operate in multiple spaces around the column 320 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More