

Six-DOF narrow-footprint biped heel-and-toe robot
A degree of freedom, robotic technology, used in motor vehicles, transportation and packaging, and can solve problems such as complex mechanical structures and control systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
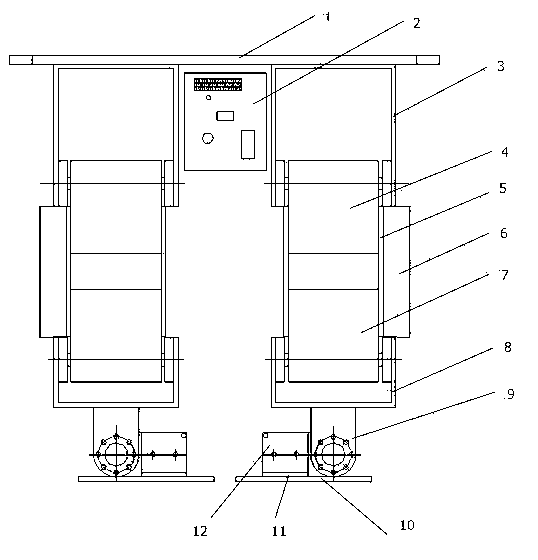
[0011] figure 1 It is a structural cross-sectional view of a six-degree-of-freedom narrow footprint bipedal walking robot. The knee U-shaped part 8 is fixedly connected with the ankle U-shaped part 9 in a cross; the knee U-shaped part 8 is connected with the motor 7 torque output shaft; The U-shaped part 9 of the hip is connected with the torque output shaft of the motor 12; 10 are parallel to the length direction, and the length direction of the sole plate 10 is parallel to the forward direction of the robot; the motor 4 is fixedly connected to the motor 7 through the connecting plate; Outside the leg; the battery 6 is fixedly connected to the connecting plate 5; the control board 2 is fixed between the U-shaped parts 3 of the hips of the left and right legs; 2 times, the knee U-shaped part 8 is the same size as the ankle U-shaped part 9; the top plate 1 is I-shaped; the sole plate 10 is rectangular; the hip U-shaped part 3, knee U-shaped part 8 and ankle U-shaped piece 9 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More